(1分钟速览)KBM-SLAM 论文阅读笔记
编辑切换为居中
添加图片注释,不超过 140 字(可选)
这篇博客记录了上面这篇论文的学习笔记。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
这个是本文的摘要,一眼开过去就是单目slam当今所遇到的问题,也即挑战场景对单目相机的影响以及单目相机如何解决挑战场景叭。当然单目相机+IMU可能是目前比较普遍的做法。然后又提了一下后端优化,说滤波的方法已经逐渐被淘汰,因为其计算量实在是太大,不过现在的r2live和r3live还是用着滤波的方法,其他slam的话一般就是位姿图或者是因子图来进行后端优化。因子图是个坑。。。千万别跳进去,否则你会体验到一年啥也做不了的摸鱼的快感。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
这句话告诉我们单目SLAM一般有如上几个流程,先是数据关联、然后初始化、位姿估计、图建立、BA优化或者位姿图优化等一系列步骤来实现SLAM。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
数据关联,直接法或者特征点法,说白了数据关联就是在找两帧图像中相同的特征点,也即特征点A在图像帧1和图像帧2中的位置在哪里,然后对应好以后开始做后面的odometry的事情。
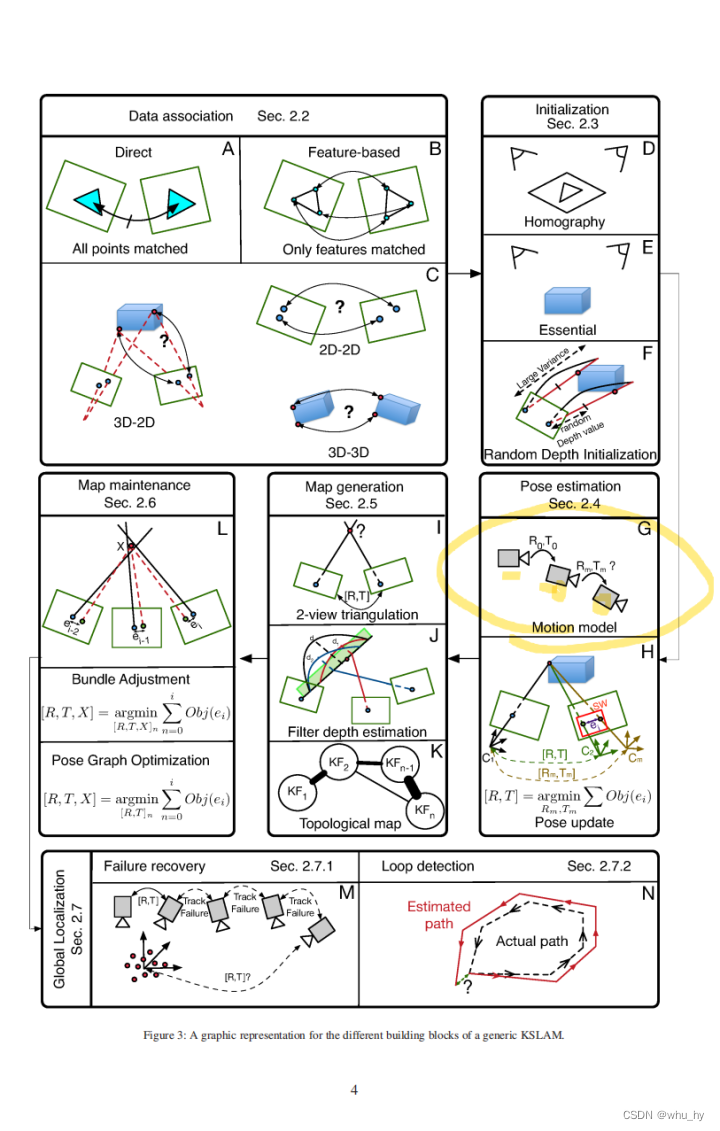
直接方法分为密集方法和半密集方法:密集方法利用每个像素的可用信息,而半密集方法利用图像亮度梯度显著的每个像素的信息。图3-A显示了一个直接方法的例子:一个感兴趣的位置(在这种情况下是一个三角形)周围的像素值通过一个变换对齐,该变换使两幅图像中两个感兴趣的位置之间的强度值最小化。在实践中,一个感兴趣的区域被定义为一个围绕着一个像素的正方形。
特征点法:引入了基于特征的方法来降低处理每个像素的计算复杂度;这是通过只匹配显著的图像位置,即特征或关键点。基于特征的匹配的一个例子如图3-B所示。一个描述符与每个特征相关联,用于提供与其他关键点的相似性的定量度量。一方面,特征被期望是独特的,对视点和照明变化不变,以及对模糊和噪声有弹性;另一方面,特征提取器需要计算效率和快速。不幸的是,这些目标很难实现,同时会导致计算速度和特征质量之间的权衡。
与直接和基于特征的方法不同,一些系统,如SVO被认为是混合的,它使用两者的结合来改进相机姿态估计,或生成密集/半密集的地图。一旦选择了一个设计,数据关联就被定义为使用2D-2D、3D-2D或3D-3D对应在不同图像之间建立测量对应的过程。不同类型的数据关联如图3-C所示。(注意,这里数据关联是被定义为不同图像之间建立测量对应的过程,也即是哪个点对应哪个点,到这里就结束了。下面算R和t属于odometry的过程,这里一定要区分开来。)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
这副图就是在说视觉slam14讲上面的内容,建议先把14讲看透了,再来看这张图,你就会发现这上面的内容和14讲上讲的内容是一致的。