模型机的组合逻辑控制器
目录
一、时序系统
1. 工作周期
(1)取指周期FT
(2)源周期ST
(3)目的周期DT
(4)执行周期ET
(5)DMA周期DMAT
(6)中断周期IT
2. 时钟周期T(节拍)
3. 工作脉冲
二、组合逻辑控制器的特点
1. 组合逻辑控制方式
2. 优缺点
3. 应用场合
各项操作所需的控制命令称为微命令。
每个微命令的产生都需要逻辑条件和时间条件,将这些条件作为输入信号,微命令(控制信号)作为输出,输入的条件和输出的微命令(控制信号)之间的关系可以用逻辑表达式来表示,因此可以用组合逻辑电路来实现。
每种微命令都需要一组逻辑电路,全机所有微命令所需的逻辑电路经过组合优化后就构成了微命令发生器。
组合逻辑控制器原理图:
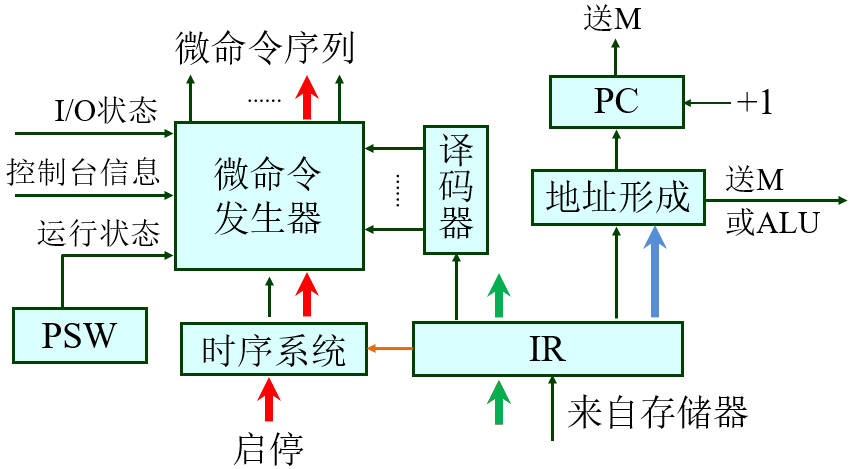
左侧:执行指令;右侧:(PC)+1指向下一条指令。
逻辑条件:
- 指令经过译码电路形成的逻辑信号
- 状态信息(包括CPU内部的和CPU外部的)
程序是由操作系统调到存储器的,从存储器读取到的现行指令存放在IR中。
时间条件:
- 由时序系统提供的时序信号
指令执行过程中每一步所需要的微命令是控制系统按步骤分时产生的,微命令不仅与指令代码有关,还与指令当前所处的工作周期和工作周期中的第几个节拍有关。因此,我们需要设计一个合适的时序系统,以便为微命令发生器提供周期、节拍和脉冲等时序信号。
一、时序系统
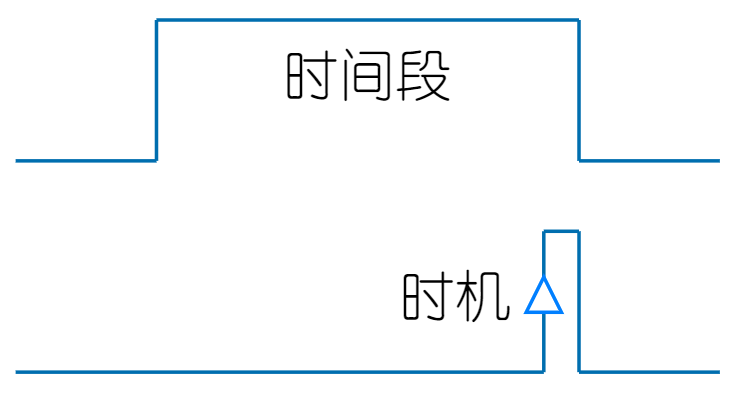
时序信号:计算机操作的时间标志。
时序系统:是指时序信号与各项操作的关系,用于规定各项操作所需的时间段和时机,即各项操作必须在规定的时间段内或者时机内完成。
(考选择题)模型机采用三级时序系统:
- 工作周期
- 时钟周期(又称节拍)
- 工作脉冲
三者关系如图所示:
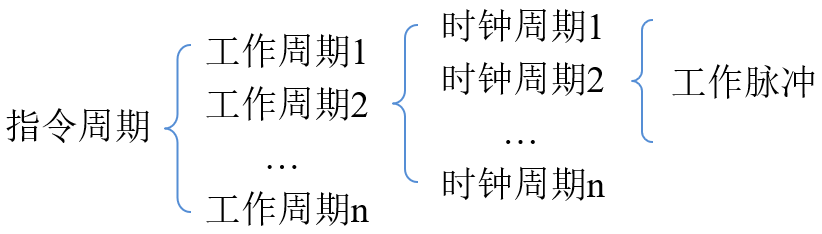
1. 工作周期
指令周期就是一条指令从读取到执行完成所需的时间,指令周期按执行阶段可以大致分为:
四个基本工作周期:
- 取指周期(FT)
- 源周期(ST)
- 目的周期(DT)
- 执行周期(ET)
用于指令的正常执行。
两个I/O操作周期:
- DMA周期(DMAT)
- 中断周期(IT)
用于I/O的传送控制。
(1)取指周期FT
在FT周期内,完成:
- 从主存取指令送入IR:M -> IR,
- 修改PC值:(PC) + 1 -> PC,PC指向下一存储单元
这是每条指令都必须经历的,与操作码和指令类型等均无关。
FT结束后,根据操作码和寻址方式转入相应的工作周期。
开始运行程序,操作系统把程序的起始地址既给了PC又给了MAR,因此不需要PC -> MAR这一步。
(2)源周期ST
如果需要从主存中读取源操作数(非寄存器直接寻址),则进入ST周期。
按指令指定的寻址方式,形成源操作数地址送入MAR,读取源操作数,并将其存入暂存器C。
(3)目的周期DT
如果需要从主存中读取目的地址或目的操作数(非寄存器直接寻址),则进入DT周期。
按指令指定的目的寻址方式,形成目的地址送入MAR或目的操作数存入暂存器D。
(4)执行周期ET
这也是各类指令都需要经历的最后一个工作周期。
依据IR中的操作码,完成指令指定的功能(如传送、运算、取转移地址送入PC等)。
在ET中还要将后继指令地址(顺序地址或转移地址)送入MAR:PC -> MAR。
(5)DMA周期DMAT
除了指令的正常执行外,CPU还需要接收外部设备的请求。当CPU响应DMA请求后,CPU进入DMAT。
在DMAT中,CPU交出系统总线的控制权,改由DMA控制器控制系统总线,实现主存与外部设备之间的数据直传。
(6)中断周期IT
IT是指CPU响应中断请求后,直到执行中断服务程序前的一个过渡期。
在IT中直接依靠硬件进行关中断、保存断点和PSW、寻找中断服务程序入口地址并转入中断服务程序等操作。
指令周期与工作周期时序的关系
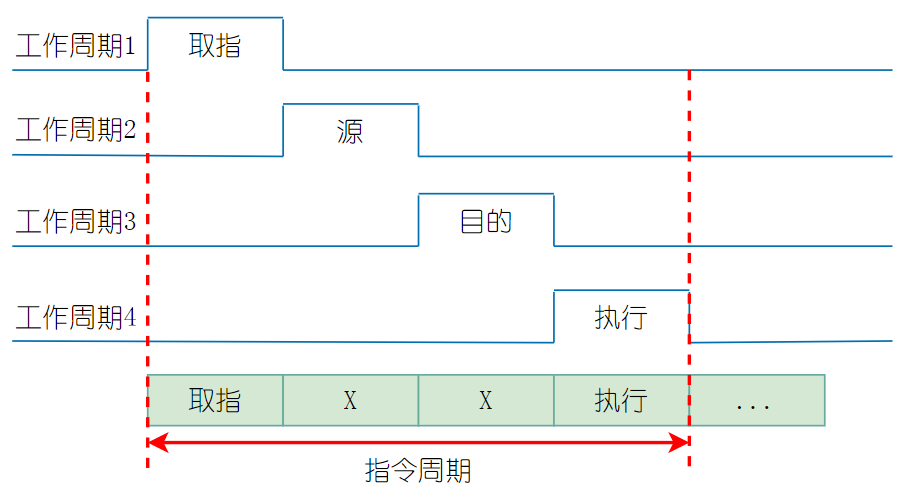
(考点)指令周期不能被打断,工作周期不能被打断,节拍不能被打断。因此,DMAT和IT只能在指令周期结束后执行,即在指令周期的最后一个节拍之后执行。
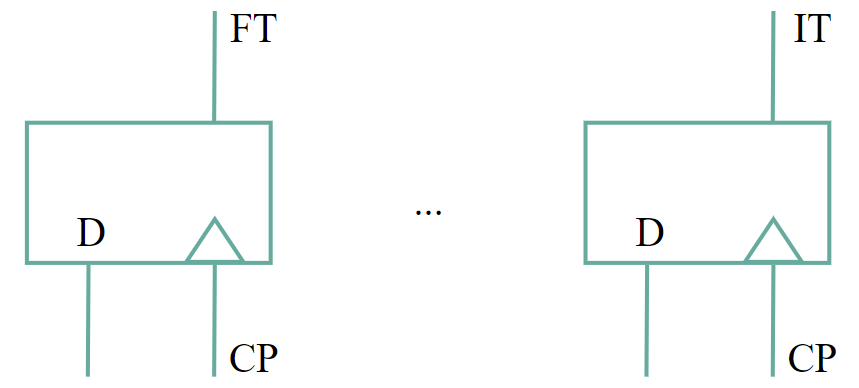
指明工作周期状态
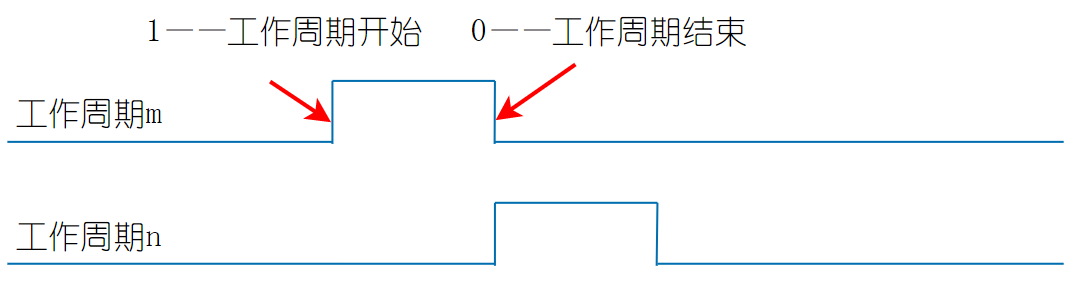
模型机设置了六种工作周期状态,可分别用六个周期状态触发器作为它们的标志。 某时间段内只有其中一个工作周期状态触发器的输出信号为1,指明CPU现在所处的工作周期状态,为该阶段的工作提供时间标志和依据。
双操作数指令各工作周期的转换流程

SR、DR:寄存器直接寻址;反之,是访存类寻址。
2. 时钟周期T(节拍)
一步:是指完成一次完整的数据通路操作。
模型机以访存时间作为一步操作时间,即时钟周期或节拍,设置为1μs。
一步操作有:
- ①一次从M读出并经数据通路传送的操作
- ②一次数据通路传送操作
- ③一次向M写入的操作
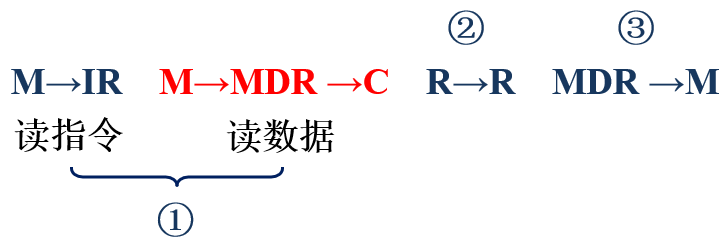
红色标出的是所需时间最长的一步操作,我们把它所需的时间定为一步操作时间。
读写主存速度慢,因为CPU和主存速度不匹配。
3. 工作脉冲
同步定时脉冲控制定时操作。
每个时钟周期结束时设置一个脉冲。
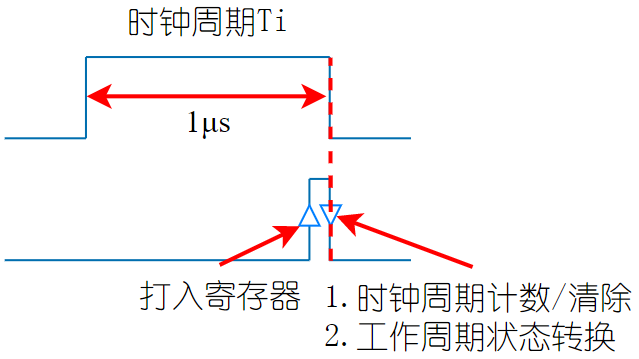
因为微命令不仅与指令有关,与指令所处的工作周期有关, 还与工作周期内的节拍序号有关。因此,在时序系统还需要设置时钟周期计数器T,或称节拍计数器T。
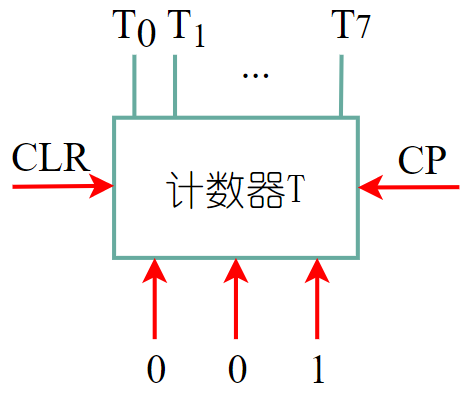
假设最长的工作周期有8个时钟周期,那么只需3位就能表示所有时钟周期的序号。
计数器复位成 000 表示CPU进入了一个新的工作周期,从 0 开始重新计数;计数器正常计数则表示工作周期不变,工作节拍发生了变化。
工作周期、时钟周期、工作脉冲的时序关系
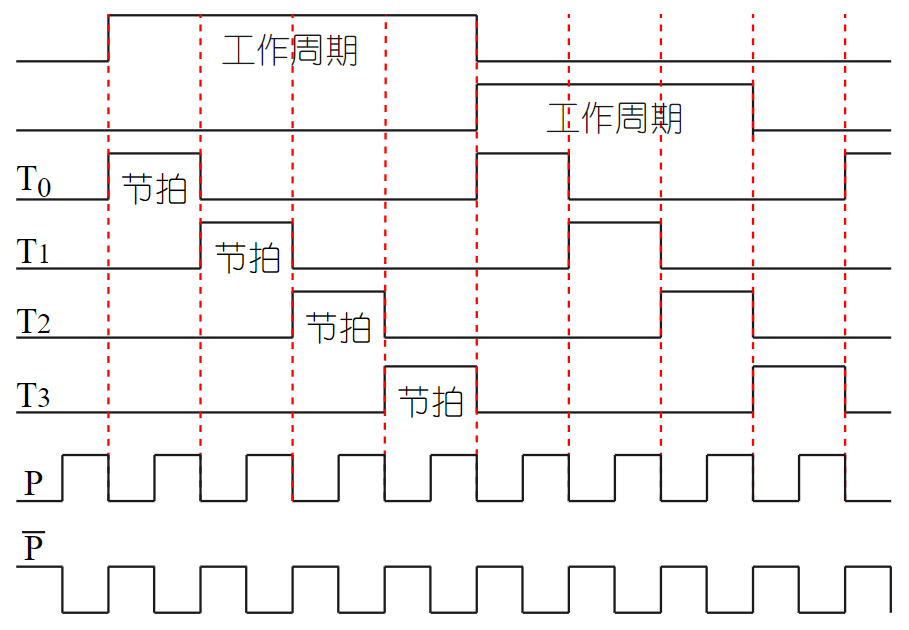
对工作脉冲取反,便可在原来下降沿的时机将时钟周期计数器T复位。
二、组合逻辑控制器的特点
1. 组合逻辑控制方式
综合化简产生微命令的条件,形成逻辑表达式,用组合逻辑电路实现;
执行指令时,由组合逻辑电路或称微命令发生器在相应时间发出所需微命令,控制有关操作。
2. 优缺点
- 产生微命令的速度较快。
- 设计不规整,设计效率较低。
- 不易修改、扩展指令系统功能。
3. 应用场合
用于高速计算机,或小规模计算机。