26.Isaac教程--导航算法
导航算法
本节详细介绍导航算法。

ISAAC教程合集地址: https://blog.csdn.net/kunhe0512/category_12163211.html
文章目录
- 导航算法
- 全局路径规划器
- 规划器模型
- 可见性图算法
- 优化器
- 轨迹规划器
全局路径规划器
Isaac 框架中的全局规划器问题被分解为三类:规划器模型、可见性图算法和优化器。
规划器模型
规划器模型 (sdk/packages/path_planner/gems/planner_model.hpp) 必须提供以下内容:
-
一组函数,提供有关给定状态是否无碰撞的信息。
-
有关两个状态之间是否存在直接路径(简单路径,例如直线)且无碰撞的信息。
-
路径的距离或长度。
-
一种在状态空间中随机采样的方法。
在carter平台的情况下,差分基座近似为圆形,允许使用距离图进行快速碰撞检测。 直接路径定义为直线上的短路径 (< 2m)(因为我们始终可以沿该方向旋转)。 因此规划问题是一个二维问题。
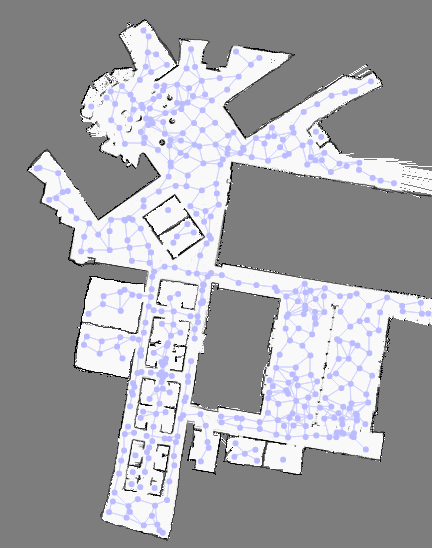
可见性图算法
灵感来自 T. SIMÉON, J.-P. LAUMOND和 C. NISSOUX 的论文“基于可见性的运动规划概率路线图”,可见性图算法提供了一种非常通用的算法来在高维空间中寻找路径。 目标是生成一个具有高可见性覆盖率的小图。
该图是通过保留一组不能直接相互连接的点(在论文中称为守卫)来构建的。 只要存在直接连接未通过任何路径连接的两个守卫的中间状态,就会添加连接。
Isaac 实现在未通过大小为 2 的路径连接的守卫之间添加了一个连接,仅使用一个中间状态。 这会产生更大但质量更高的图表。
一旦构建了图形,就可以通过首先找到这些状态与守卫之间的连接,然后在图形上运行 Djikstra 算法来计算最短路径。 只要环境是静态的,就可以预先计算同一个图,在遇到困难问题时手动辅助,并重复用于其他最短路径请求。
为了获得更好的性能,请通过增加随机样本的数量来构建密集图。
优化器
最终状态是路径优化。 快速路径生成期间的可见性图会产生非常混乱的路径。 然后使用捷径计算质量更好的路径:随机选择两个路径点,如果它们之间存在直接路径,则绕过中间的所有路径点。 此外,接近障碍物的航路点从最近的障碍物移开。

轨迹规划器
Isaac 的局部规划器是基于线性二次调节器 (LQR) 的。 Isaac SDK 提供可定制的 LQR 求解器。 系统的动力学以及成本函数需要提供给 LQR 求解器,后者使用线性搜索执行迭代梯度下降以找到最佳路径。
在carter 平台的情况下,系统的动态是微分基础的动态:
-
State:
-
x ( t ) x(t) x(t): X position of the base
-
y ( t ) y(t) y(t): Y position of the base
-
θ ( t ) θ(t) θ(t): Orientation of the base
-
v ( t ) v(t) v(t): Linear velocity
-
θ ′ ( t ) θ′(t) θ′(t): Angular velocity
-
-
Control:
-
a l ( t ) al(t) al(t): Left wheel angular acceleration
-
a r ( t ) ar(t) ar(t): Right wheel angular acceleration
-
动力学然后由公式给出(L 是基本长度,R 是车轮半径):
-
x ′ ( t ) = v ( t ) c o s ( θ ( t ) ) x′(t)=v(t)cos(θ(t)) x′(t)=v(t)cos(θ(t))
-
y ′ ( t ) = v ( t ) s i n ( θ ( t ) ) y′(t)=v(t)sin(θ(t)) y′(t)=v(t)sin(θ(t))
-
θ ′ ( t ) = θ ′ ( t ) θ′(t)=θ′(t) θ′(t)=θ′(t)
-
v ′ ( t ) = a ( t ) = ( a r ( t ) + a l ( t ) ) ⋅ R / 2 v′(t)=a(t)=(ar(t)+al(t))⋅R/2 v′(t)=a(t)=(ar(t)+al(t))⋅R/2
-
θ ′′ ( t ) = ( a r ( t ) − a l ( t ) ) ⋅ R / L θ′′(t)=(ar(t)−al(t))⋅R/L θ′′(t)=(ar(t)−al(t))⋅R/L
以下是 carter 在本地视图中生成的路径示例:

本地地图和距离地图都是实时计算的。 红色是全局规划器提供的路径,蓝色是 LQR 生成的计划,优化速度、障碍物距离、加速度和其他因素。
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561
