从【卡内基梅隆大学机器人概论课】认识机器人学科需要哪些技能栈
闲来无事,找到了卡内基梅隆大学机器人研究所,看了下他们机器人的教育,不得不感慨相比我们学校先进了不知多少,是真真切切让同学们去了解机器人的方方面面,下面摘自它们的概论作业。
作业0
作业1

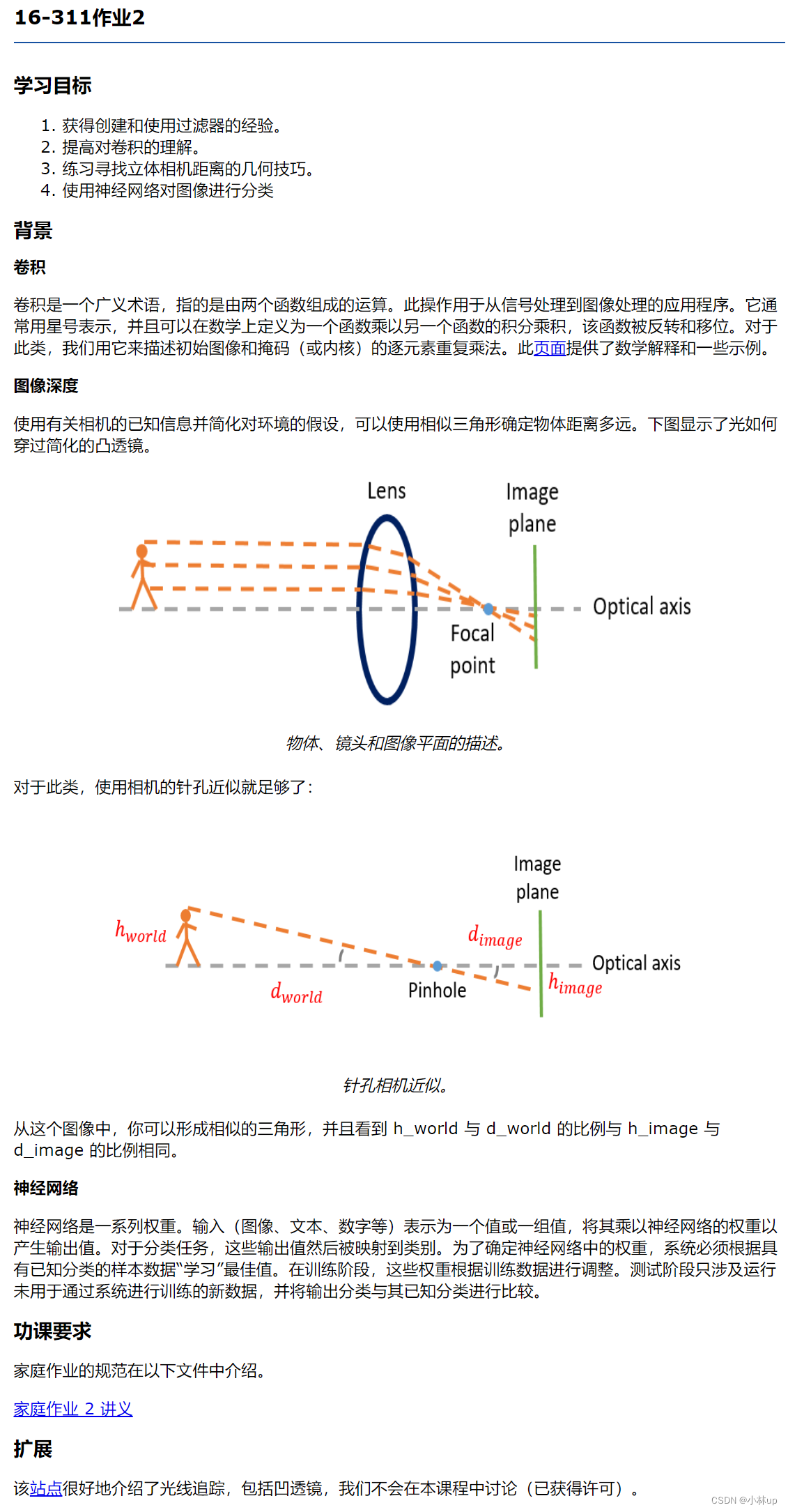
作业2
作业3
作业4
作业5
作业6
没有公开作业7…
作业8
作业9
作业10
所有作业的压缩包我上传到了资源,可以去下载。
基本上我们可以看到,每一门课都包含丰富的训练:
0.C、Matlab、Python、自建网站、LaTex、线性代数等数学知识
1.图像识别和处理
2.神经网络、卷积、立体相机
3.传感器、控制和感知
4.运动规划、强化学习
5.路径规划、计算几何(veronoi图)
6.图搜索算法
8.刚体旋转和平移
9.逆向运动学、工作空间
10.约束系统、逆运动学、李括号
参考
[1]卡内基梅隆大学机器人研究所-教育版块