基于51单片机的pm2.5空气质量监测仪仿真设计
51单片机pm2.5监测仪仿真设计( proteus仿真+程序+报告+讲解视频)
仿真图proteus 7.8及以上
程序编译器:keil 4/keil 5
编程语言:C语言
设计编号:S0032
51单片机pm2.5监测仪仿真设计
- 主要功能:
- 讲解演示视频
- 仿真
- 程序
- 设计报告
- 1.1.1、设计的主要内容
- 1.1.2、设计的主要意义
- 资料清单以及下载方式
主要功能:
1.设计要求
采用51单片机作为核心控制器,检测pm2.5浓度。
简要设计内容:
1、pm2.5的检测与显示;
2、当pm2.5>100时报警;
3、其他创新内容
具体功能:
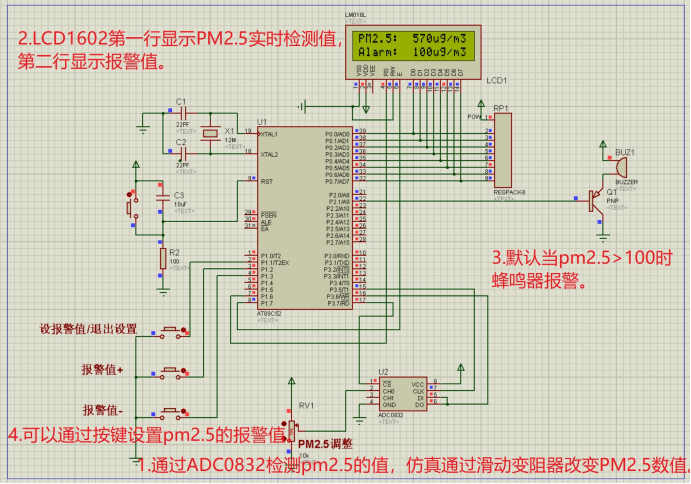
1.通过ADC0832检测pm2.5的值,仿真通过滑动变阻器改变PM2.5数值。
2.LCD1602第一行显示PM2.5实时检测值,第二行显示报警值。
3.默认当pm2.5>100时蜂鸣器报警。
4.可以通过按键设置pm2.5的报警值。
以下为本设计资料展示图:
讲解演示视频
51单片机PM2.5空气质量监测仪proteus仿真设计
仿真
开始仿真
1.通过ADC0832检测pm2.5的值,仿真通过滑动变阻器改变PM2.5数值。
2.LCD1602第一行显示PM2.5实时检测值,第二行显示报警值。
3.默认当pm2.5>100时蜂鸣器报警。
4.可以通过按键设置pm2.5的报警值。
程序
#include <reg52.h>
#include <intrins.h>
#define uint unsigned int
#define uchar unsigned char //宏定义
sbit RS=P1^6;//液晶接口
sbit EN=P1^7;
sbit LED = P2^0;//粉尘传感器控制接口
sbit ADCS = P3^7;//AD0832接口
sbit ADCLK =P3^5;
sbit ADDI = P3^6;
sbit ADDO = P3^6;
sbit SET= P1^1;//按键接口
sbit ADD= P1^2;
sbit DEC= P1^3;
sbit BEEP=P2^1;//蜂鸣器接口
uchar set_st;
uchar tab[5];
uint DUST_SET=100; //固体颗粒的阈值
//bit shanshuo_st; //闪烁间隔标志
bit beep_st; //蜂鸣器间隔标志
uchar x=4; //计数器
//定义标识
uchar FlagStart = 0;
float DUST_Value;
uint DUST;
uchar num=0;
uchar mm;
uchar abc;
uchar ADC_Get[10]={0}; //定义AD采样数组
uchar str[5]={0};
/*****初始化定时器0*****/
void InitTimer(void)
{
TMOD = 0x01;
TL0 = (65536-10000)/256; //定时10ms
TH0 = (65536-10000)%256;
TR0 = 1;
ET0 = 1;
EA = 1;
}
/*************************lcd1602程序**************************/
void delay1ms(uint ms)//延时1毫秒
{
uint i,j;
for(i=0;i<ms;i++)
for(j=0;j<100;j++);
}
void wr_com(uchar com)//写指令//
{
delay1ms(1);
RS=0;
// RW=0;
EN=0;
P0=com;
delay1ms(1);
EN=1;
delay1ms(1);
EN=0;
}
void wr_dat(uchar dat)//写数据//
{
delay1ms(1);;
RS=1;
// RW=0;
EN=0;
P0=dat;
delay1ms(1);
EN=1;
delay1ms(1);
EN=0;
}
/*****************************液晶初始化
*********************************************/
void lcd_init()//初始化设置//
{
delay1ms(15);
wr_com(0x38);
delay1ms(5);
wr_com(0x01);
delay1ms(5);
wr_com(0x06);
delay1ms(5);
wr_com(0x0c);
delay1ms(5);
wr_com(0x80);
wr_dat('P');//
wr_com(0x81);
wr_dat('M');//:
wr_com(0x82);
wr_dat('2');//
wr_com(0x83);
wr_dat('.');//:
wr_com(0x84);
wr_dat('5');//:
wr_com(0x85);
wr_dat(':');
wr_com(0x8b);
wr_dat('u');
wr_com(0x8c);
wr_dat('g');
wr_com(0x8d);
wr_dat('/');
wr_com(0x8e);
wr_dat('m');
wr_com(0x8f);
wr_dat('3');
/
wr_com(0xc0);
wr_dat('A');
wr_com(0xc1);
wr_dat('l');
wr_com(0xc2);
wr_dat('a');
wr_com(0xc3);
wr_dat('r');
wr_com(0xc4);
wr_dat('m');
wr_com(0xc5);
wr_dat(':');
wr_com(0xcb);
wr_dat('u');
wr_com(0xcc);
wr_dat('g');
wr_com(0xcd);
wr_dat('/');
wr_com(0xce);
wr_dat('m');
wr_com(0xcf);
wr_dat('3');
}
/*****************显示函数******************************/
void disp(unsigned int Data)//PM2.5值显示
{
uint Temp;
Temp=Data%10000;
str[0]=' ';//Temp/1000+0x30; //千位
Temp%=1000;
str[1]=' ';
str[2]=Temp/100+0x30; //百位
Temp%=100;
str[3]=Temp/10+0x30; //十位
str[4]=Temp%10+0x30; //个位
wr_com(0x86);
wr_dat(str[0]);
wr_com(0x87);
wr_dat(str[1]);
wr_com(0x88);
wr_dat(str[2]);
wr_com(0x89);
wr_dat(str[3]);
wr_com(0x8a);
wr_dat(str[4]);
}
/************************报警值显示************************************/
void baojing()
{
wr_com(0xc6);
wr_dat(tab[0]);
wr_com(0xc7);
wr_dat(tab[1]);
wr_com(0xc8);
wr_dat(tab[2]+0x30);
wr_com(0xc9);
wr_dat(tab[3]+0x30);
wr_com(0xca);
wr_dat(tab[4]+0x30);
}
/*****延时子程序*****/
void Delay(uint num)
{
while( --num );
}
/**************************按键检测
*******************************************/
void checkkey()
{
if(SET==0)
{
Delay(2000);
do{}while(SET==0);
set_st++;
if(set_st>1)set_st=0;
}
if(set_st==0)
{
}
else if(set_st==1)
{
if(DEC==0)
{
Delay(2000);
do{}while(DEC==0);
if(DUST_SET>0)DUST_SET--;
if(DUST_SET==0)DUST_SET=0;
}
if(ADD==0)
{
Delay(2000);
do{}while(ADD==0);
DUST_SET++;
if(DUST_SET>800)DUST_SET=800;
}
}
tab[0]=' ';//DUST_SET/1000;
tab[1]=' ';
tab[2]=DUST_SET%1000/100;
tab[3]=DUST_SET%100/10;
tab[4]=DUST_SET%10;
}
/*****报警子程序*****/
void Alarm()
{
if(x>=10){beep_st=~beep_st;x=0;}
if(DUST>DUST_SET&&beep_st==1)BEEP=0;
else BEEP=1;
// if(DUST>0&&DUST<100){LED2=0;LED3=1;LED4=1;}
// if(DUST>=10&&DUST<300){LED2=1;LED3=0;LED4=1;}
// if(DUST>=300){LED2=1;LED3=1;LED4=0;}
}
/**************************AD0832转换程序
***********************************************/
uchar ADC0832(bit mode,bit channel) //AD转换,返回结果
{
uchar i,dat,ndat;
ADCS = 0;//拉低CS端
_nop_();
_nop_();
ADDI = 1; //第1个下降沿为高电平
ADCLK = 1;//拉高CLK端
_nop_();
_nop_();
ADCLK = 0;//拉低CLK端,形成下降沿1
_nop_();
_nop_();
ADDI = mode; //低电平为差分模式,高电平为单通道模式。
ADCLK = 1;//拉高CLK端
_nop_();
_nop_();
ADCLK = 0;//拉低CLK端,形成下降沿2
_nop_();
_nop_();
ADDI = channel; //低电平为CH0,高电平为CH1
ADCLK = 1;//拉高CLK端
_nop_();
_nop_();
ADCLK = 0;//拉低CLK端,形成下降沿3
ADDI = 1;//控制命令结束(经试验必需)
dat = 0;
//下面开始读取转换后的数据,从最高位开始依次输出(D7~D0)
for(i = 0;i < 8;i++)
{
dat <<= 1;
ADCLK=1;//拉高时钟端
_nop_();
_nop_();
ADCLK=0;//拉低时钟端形成一次时钟脉冲
_nop_();
_nop_();
dat |= ADDO;
}
ndat = 0; //记录D0
if(ADDO == 1)
ndat |= 0x80;
//下面开始继续读取反序的数据(从D1到D7)
for(i = 0;i < 7;i++)
{
ndat >>= 1;
ADCLK = 1;//拉高时钟端
_nop_();
_nop_();
ADCLK=0;//拉低时钟端形成一次时钟脉冲
_nop_();
_nop_();
if(ADDO==1)
ndat |= 0x80;
}
ADCS=1;//拉高CS端,结束转换
ADCLK=0;//拉低CLK端
ADDI=1;//拉高数据端,回到初始状态
if(dat==ndat)
return(dat);
else
return 0;
}
/*****定时器0中断服务程序*****/
void timer0(void) interrupt 1
{
uint j;
TL0 = (65536-10000)/256; //定时10ms
TH0 = (65536-10000)%256;
LED=1; //开启传感器的LED
x++;
for (j=0;j<30;j++); //0.28ms //延时0.28ms
abc=ADC0832(1,0); //开启ADC采集
FlagStart=1;
TR0 = 0; //先关闭定时器0
EA = 0;
LED=0;//关闭传感器LED
}
//中值滤波
//算法:先进行排序,然后将数组的中间值作为当前值返回。
uchar Error_Correct(uchar *str,uchar num)
{
unsigned char i=0;
unsigned char j=0;
unsigned char Temp=0;
//排序
for(i=0;i<num-1;i++)
{
for(j=i+1;j<num;j++)
{
if(str[i]<str[j])
{
Temp=str[i];
str[i]=str[j];
str[j]=Temp;
}
}
}
//去除误差,取中间值
return str[num/2];
}
/*****主函数*****/
void main(void)
{
InitTimer(); //初始化定时器
BEEP=1;
lcd_init();//初始化显示
delay1ms(500);
while(1)
{
checkkey();//按键检测
if(set_st==0)
{
//wr_com(0x0c);
if(FlagStart==1) //1次数据采集完成
{
num++;
ADC_Get[num]=abc;
if(num>9)
{
num=0;
// DUST=Error_Correct(ADC_Get,10); //求取10次AD采样的值
// DUST_Value=(DUST/256.0)*5000; //转化成电压值MV
// DUST_Value=DUST_Value*0.17-100; //固体悬浮颗粒浓度计算 Y=0.17*X-0.1 X--采样电压V
DUST=Error_Correct(ADC_Get,10);
DUST_Value=(DUST/256.0)*5;//转化成电压值
DUST_Value=(DUST_Value*0.17-0.1)*1000;//固体悬浮颗粒浓度计
if(DUST_Value<0) DUST_Value=0;
if(DUST_Value>760) DUST_Value=760; //限位
DUST=(uint)DUST_Value;
}
TL0 = (65536-10000)/256;
TH0 = (65536-10000)%256;
TR0 = 1; //开启定时器0
EA = 1;
FlagStart=0;
}
Alarm(); //报警检测
}
if(set_st==1)//报警值闪动
{
// wr_com(0xca);
// wr_com(0x0d);
// delay1ms(150);
}
}
}
设计报告
报告格式规范,字数13739,含各种框图。
1.1、设计的主要内容和意义
1.1.1、设计的主要内容
本设计提出的检测空气质量PM2.5的方案最基本的实现方法是由单片机、粉尘监测传感器、显示模块、报警模块等组成的电路, GP2Y1010AU0F粉尘传感器采集空气中PM2.5的浓度值,经过51单片机处理后,在LCD1602液晶上显示,并通过LED和蜂鸣器提示浓度状态。
1.1.2、设计的主要意义
21世纪的今天,科学技术的发展日新月异,科学技术的进步同时也带动了测量技术的发展,现代控制设备不同于以前,它们在性能和结构发生了翻天覆地的变化。我们已经进入了高速发展的信息时代,测量技术是当今社会的主流,广泛地深入到应用工程的各个领域。
因为空气质量的恶化,阴霾天气现象出现增多,危害现象加重。中国不少地区把阴霾天气现象并入雾一起作为灾害性天气预警预报。统称为“雾霾天气”。雾霾主要由PM2.5、PM10、PM0.1以及重金属镍砷铬铅等颗粒组成。在空气动力学和环境气象学中,颗粒物是按直径大小来分类的,粒径小于100微米的称为TSP(TotalSuspendedParticle),即总悬浮物颗粒;粒径小于10微米的称为PM10(PM为ParticulateMatter缩写),即可吸入颗粒物;粒径小于2.5微米的称为PM2.5,即可入肺颗粒物,它的直径仅相当于人的头发丝粗细的1/20。虽然PM2.5只是地球大气成分中含量很少的组分,但它与较粗的大气颗粒物相比,粒径小,富含大量的有毒、有害物质且在大气中的停留时间长、输送距离远,因而对人体健康和大气环境质量影响更大。
世界卫生组织发布的报告显示,无论是发达国家还是发展中国家,目前大多数城市和农村人口均遭受到颗粒物对健康的影响。高污染城市中的死亡率超出相对清洁城市的15%至20%。据统计,在欧洲,PM2.5每年导致386000人死亡,并使欧盟国家人均期望寿命减少8.6个月。人体的生理结构决定了对PM2.5没有任何过滤、阻拦能力,而PM2.5对人类健康的危害却随着医学技术的进步,逐步暴露出其恐怖的一面。气象专家和医学专家认为,由细颗粒物造成的灰霾天气对人体健康的危害甚至要比沙尘暴更大。粒径10微米以上的颗粒物,会被挡在人的鼻子外面;粒径在2.5微米至10微米之间的颗粒物,能够进入上呼吸道,但部分可通过痰液等排出体外,另外也会被鼻腔内部的绒毛阻挡,对人体健康危害相对较小;而粒径在2.5微米以下的细颗粒物,直径相当于人类头发的1/10大小,不易被阻挡。被吸入人体后会直接进入支气管,刺激呼吸道,干扰肺部的气体交换,从而引发咳嗽、呼吸困难、哮喘、慢性支气管炎等呼吸系统的疾病并导致心律不齐、非致命性心脏病等心血管方面的疾病。其中,老人、小孩以及心肺疾病患者是PM2.5污染的敏感人群。
因此,对PM2.5的监测与治理便显得越来越重要。
资料清单以及下载方式
见视频
