单片机毕业设计 stm32智能婴儿床系统
文章目录
- 1 简介
- 2 项目背景
- 3 设计概要
- 4 设计方案
- 5 硬件清单
- 5.1 stm32主控
- 5.2 OLED显示屏
- 5.3 继电器模块
- 5.4 L298N电机驱动板模块
- 5.5 MAX声音传感模块 一个
- 5.6 Jdy-311蓝牙模块
- 5.7 音乐播放模块
- 6 软件部分设计
- 6.1 声音传感器子函数
- 6.2 声音传感器软件
- 7 实现效果
- 8 关键代码
1 简介
🔥 Hi,大家好,这里是丹成学长的毕设系列文章!
🔥 对毕设有任何疑问都可以问学长哦!
这两年开始,各个学校对毕设的要求越来越高,难度也越来越大… 毕业设计耗费时间,耗费精力,甚至有些题目即使是专业的老师或者硕士生也需要很长时间,所以一旦发现问题,一定要提前准备,避免到后面措手不及,草草了事。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的新项目是
🚩 基于stm32的智能婴儿车 婴儿床
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:4分
- 工作量:4分
- 创新点:3分
🧿 选题指导, 项目分享:
https://blog.csdn.net/molodi/article/details/125933857
2 项目背景
目前的能婴儿床使用的系统主要是结合组网技术、通信技术、检测技术、智慧控制水平于一体化运用到智能产品中。过去因为不同厂家运用不同通讯协议和技术指标,造成很多智能产品均采用集合布线综合系统或者电力载波传输系统。任何一种控制系统,核心部分都是数据通信技术的运用,所以,数据通信技术是智能婴儿床控制系统中的核心部分。因此未来智能婴儿床控制系统是结合了智慧控制技术、高速信号处理技术、无线信号组网传输技术和无线传感器技术。可以说未来的能婴儿床控制系统是赋予智慧的技术,能够实现多方面的信息互交服务,改变我们的科技生活环境。通过能婴儿床控制系统平台还可以扩充到其它服务平台,使得我们生活工作更加智能化,安全化和环保护。
3 设计概要
学长设计的系统的内容主要是介绍了利用了STC89C52作为控制系统的核心单元,再加上声音传感器,温湿度传感器,音乐片,减速电机等硬件的相辅相成,组成了一个物美价廉,便于安装,可靠稳定的智能婴儿车系统,以及其硬件软件的基本设计和有关单片机等方面的相关知识。
该系统可以通过这些传感器收集各种婴儿哭声及温湿度信息,再把这些收集来的信号发送给单片机进行处理,根据这些信号的收集,可以向我们展示当婴儿啼哭时播放音乐,摇床转动,同时实在采集温湿度信息并在液晶屏上呈现温湿度。此设计可以自动的安抚婴儿安睡,非常地有效且实用。
4 设计方案
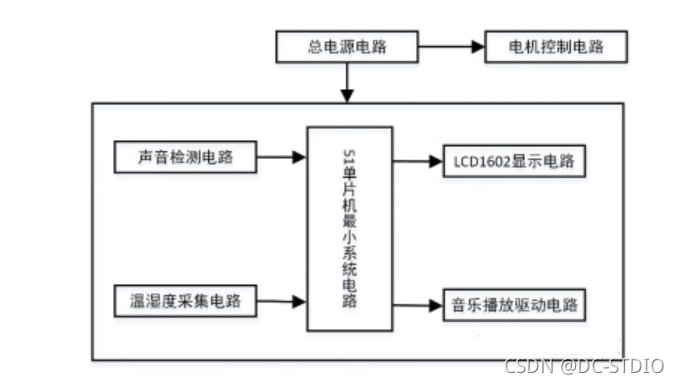
系统由STC89C52单片机电路+DHT11温湿度传感器+声音检测电路+蜂鸣器驱动电路+音乐片驱动电路+LCD1602液晶显示电路+电机电路+电源电路组成。
-
1、系统将温湿度信息实时显示在LCD1602液晶上。
-
2、声音传感器检测声音,如果当前声音超过设定的阈值,则音乐片播放音乐(10秒后停,音乐播放时,声音传感器不起作用,防止音乐播放做成声音检测干扰)。
-
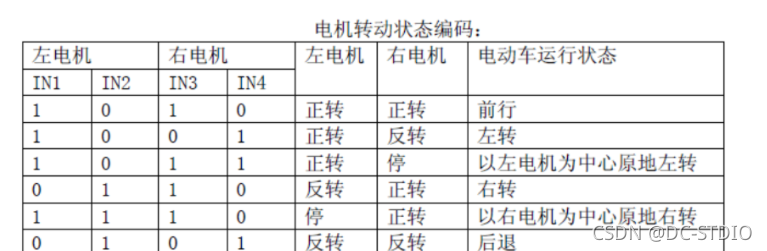
3、通过电位器实现电机的调速,电机模拟摇床功能。
系统以STC89C52单片机为核心控制单元,先由声音传感器先检测是否有啼哭声,再将信号反馈给单片机进行处理,与原先设定的声音阈值进行比较后,再对音乐片电路进行控制,并且显示模块上会显示由温湿度传感器所探测到的数值。
本设计的主要功能作用有以下三个方面:第一,该设计系统中有一个声音传感器,实时的采集声音信息,与程序中设定的阈值进行比对,当超过阈值时,就会驱动音乐片发出声音。第二,该系统中有温湿度监测模块,可以实时的对婴儿所处的环境温湿度进行监测,直观的使人感受到婴儿所处环境的温湿度变化。第三,配备直流电机,当婴儿啼哭时,可以实时的给予安抚。
5 硬件清单
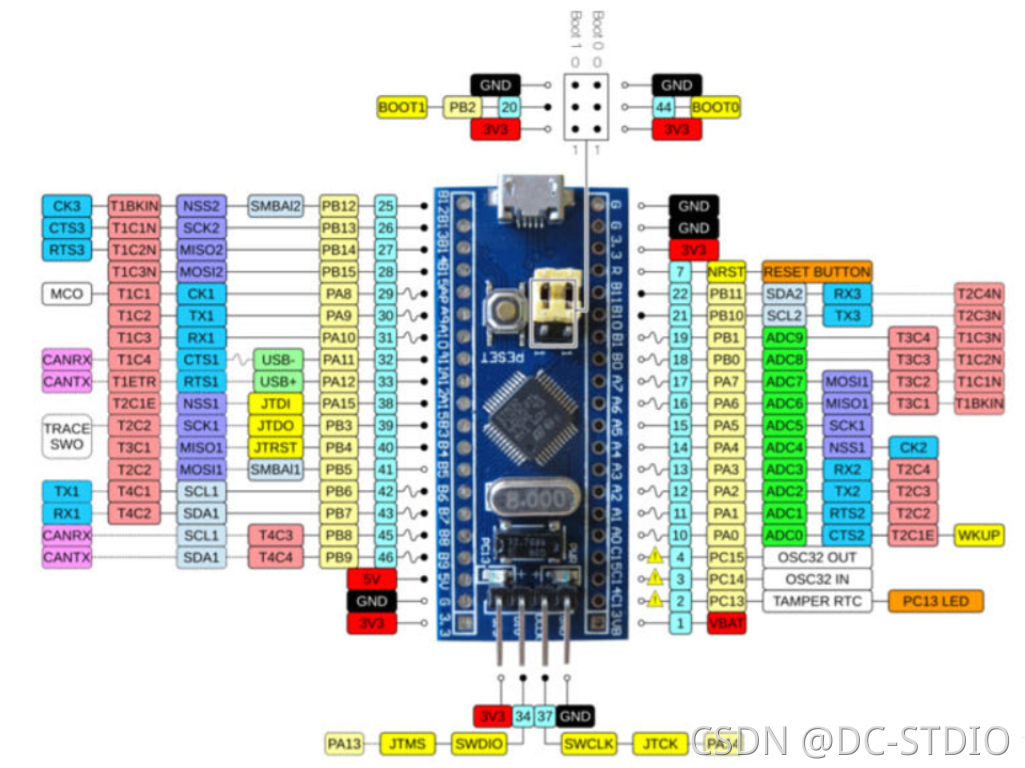
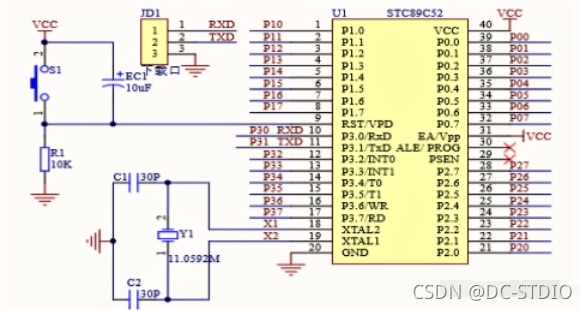
5.1 stm32主控
单片机最小的系统电路是由电源电路、复位电路和时钟电路所构成的,其作为单片机最重要的组成部分,担负着单片机可以正常工作的重任,是最重要的保障。
原理图
5.2 OLED显示屏

接线:VCC-3.3/5V GND-GND SCL-单片机SCL脚 SDA-单片机SDA脚
5.3 继电器模块
上面口VCC-5V GND-GND PIN-单片机信号脚,下面口选择常开/常闭连接负载

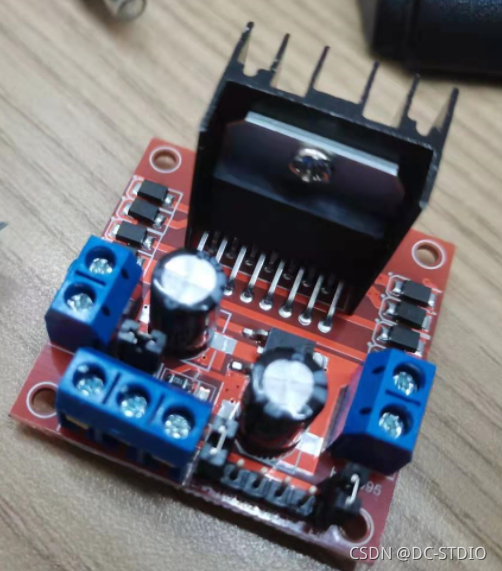
5.4 L298N电机驱动板模块
接法如下 由于不用配置正反转可以四个口随便接 只是用来驱动电机的作用(需要与单片机共地)
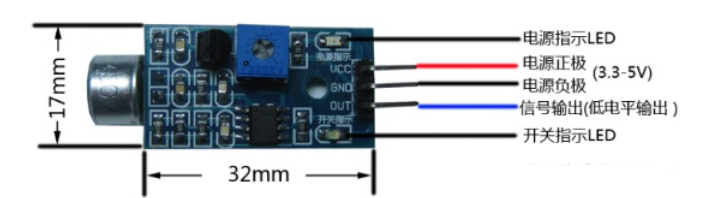
5.5 MAX声音传感模块 一个
VCC接5VGND-GND OUT接信号脚

声音传感器是一种对声音敏感的模块,声音传感器模块内部电路图如下图所示,驻极体话筒来检测声音。驻极体话筒属于电容式话筒的一种,声电转换的关键元件是驻极体振动膜。当声波输入时,驻极体膜片随声波的强弱而振动,使电容极板间的距离发生变化,引起电容量C发生变化,因为驻极体两侧的电荷不变,因此电容C3两端的电压(UC=Q/C)发生变化,从而实现了声电转换。由于振动引起的输出电压的变化量较小,需要增加三极管9013放大电路,提高话筒的灵敏度。其中R1电阻为分压电阻,将声音传感器检测到的声音信息转化为模拟电压信号,模拟量信号接入LM393比较器后,即可与LM393比较器芯片2号引脚所接的电位器分压后的模拟电压进行比较,进而得出DO数字信号(即高低电平信号)。C1、C2为滤波电容,C1电容对电源进行滤波,让电源输出更稳定。C2电容对模拟信号进行滤波,保证模拟信号输出的稳定性。R5、R6均为限流电阻,来保护LED灯,防止LED灯烧坏,LED灯均为低电平有效。R7为上拉电阻,上拉就是将不确定的信号通过一个电阻钳位在高电平,同时起限流作用。保证LM393比较器输出的高低电平信号在与单片机引脚连接时电平信号的读取更加稳定。

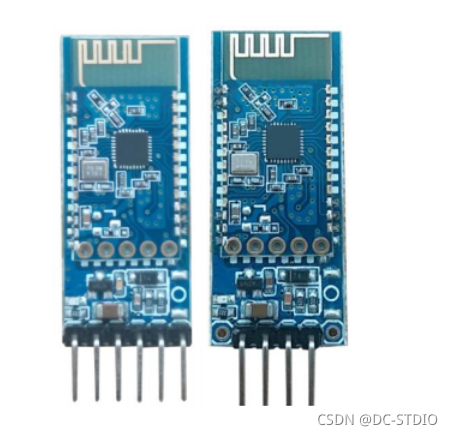
5.6 Jdy-311蓝牙模块
接法 VCC GND接5V的源 TXD接单片机RXD RXD接单片机TXD
5.7 音乐播放模块

6 软件部分设计
系统采用的程序编写和调试的软件是Keil uVision4,C语言是本系统采用的编程语言,其不错的易读性和移植性让其成为相当热门的编程语言。系统软件设计图如图所示。
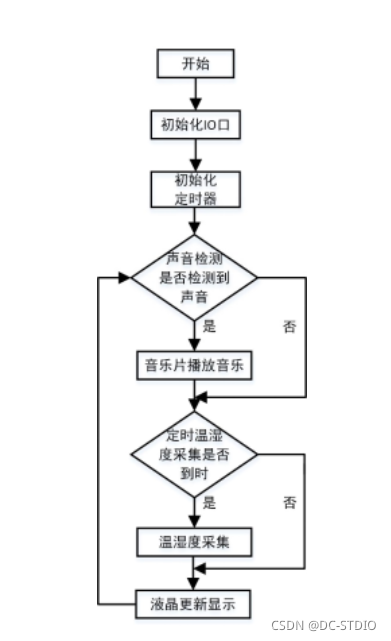
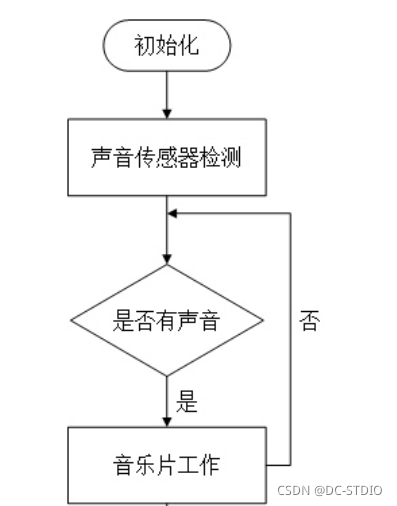
6.1 声音传感器子函数
当进入到主程序后,声音传感器可以实时检测大约3米范围内是否有声音存在,当其检测到有声音超过他的阀值时会输出高电平,当其监测范围内没声音时则会延时输出低电平。它的三个引脚作用分别是接电源,接地以及作为信号输出的引脚。当输出高电平时,此时就代表有声音,于是就会驱动主控程序使音乐片响起安抚婴儿,声音传感器软件设计流程如图所示。
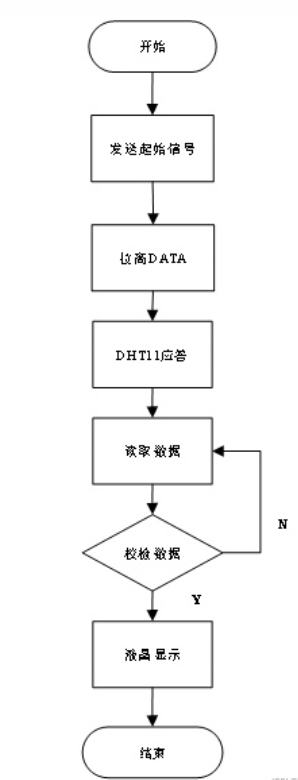
6.2 声音传感器软件
当进入到主程序后,温湿度传感器可以实时检测环境中温湿度的变化,并将其实时的显示在液晶屏上,当上电后单片机会发送起始信号,同时拉高DATA,温湿度模块就会响应单片机的信号,同时将监测到的数据实时的传递给单片机,单片机就会读取这些信息,并在程序中进行校检。如果数据符合,就显示在液晶屏上。温湿度传感器软件设计流程如图所示
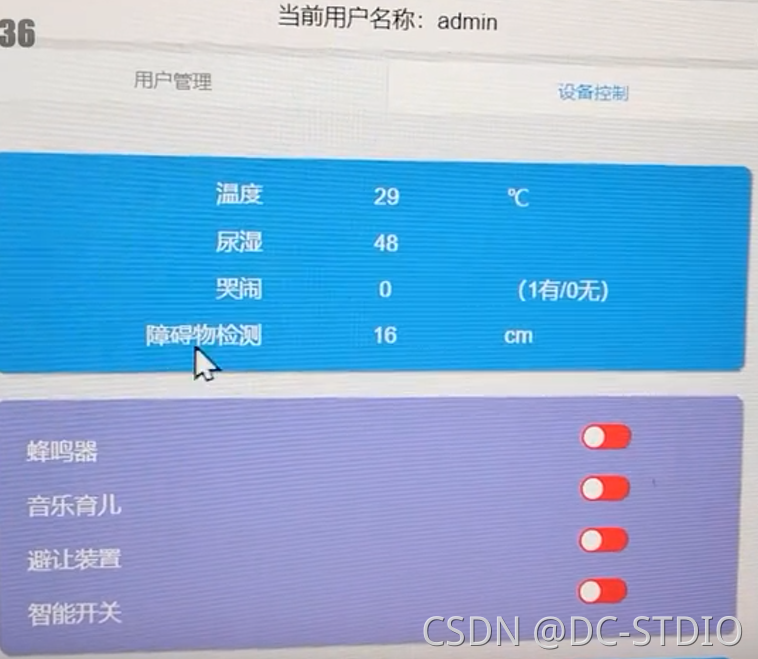
7 实现效果
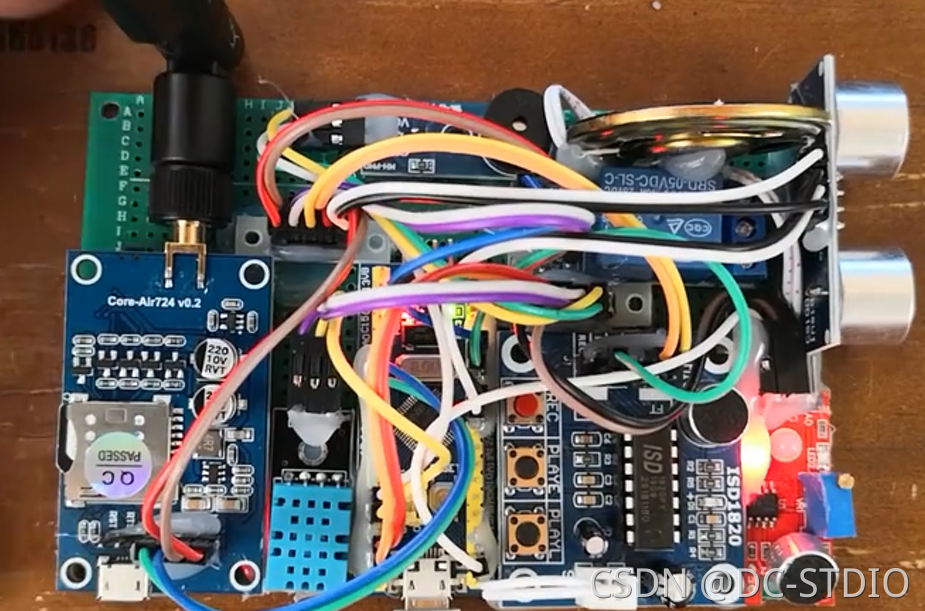
上位机部分(暂不开源)

8 关键代码
main.c
#include "delay.h"
#include "sys.h"
#include "oled.h"
#include "bmp.h"
#include "key.h"
#include "dht11.h"
#include "usart.h"
#include "timer.h"
#include "led.h"
#include "ds18b20.h"
#include "rtc.h"
#include "usmart.h"
#define ADC1_DR_Address ((u32)0x4001244C)
vu16 ADC_ConvertedValue;
float AD_value;
void ADC_Configuration1(void)
{
ADC_InitTypeDef ADC_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOB, &GPIO_InitStructure);
DMA_DeInit(DMA1_Channel1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address;
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&ADC_ConvertedValue;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = 1;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Disable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel1, &DMA_InitStructure);
DMA_Cmd(DMA1_Channel1, ENABLE);
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = ENABLE;
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 1, ADC_SampleTime_239Cycles5);
ADC_DMACmd(ADC1, ENABLE);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
}
int main(void)
{
u8 ccc=99;
u8 a;
u8 key=0;
u16 led0pwmval=0;
u8 dir=1;
u8 t=0;
short temperature;
u8 humidity;
delay_init(); //��ʱ������ʼ��
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //����NVIC�жϷ���2:2λ��ռ���ȼ���2λ��Ӧ���ȼ� LED_Init(); //LED�˿ڳ�ʼ��
delay_ms(8000);
uart_init(9600);
OLED_Init(); //��ʼ��OLED
OLED_Clear();
KEY_Init();
TIM3_PWM_Init(899,0);
LED_Init();
usmart_dev.init(SystemCoreClock/1000000); //��ʼ��USMART
RTC_Init();
ADC_Configuration1();
TIM_SetCompare2(TIM3,1000);
OLED_ShowCHinese(0,0,0);
OLED_ShowCHinese(18,0,15);
OLED_ShowCHinese(36,0,16);
OLED_ShowCHinese(54,0,17);
OLED_ShowCHinese(110,0,6);
OLED_ShowCHinese(0,2,11);
OLED_ShowCHinese(18,2,12);
OLED_ShowCHinese(36,2,13);
OLED_ShowCHinese(54,2,14);
OLED_ShowCHinese(0,4,18);
OLED_ShowCHinese(18,4,19);
OLED_ShowCHinese(36,4,20);
OLED_ShowCHinese(54,4,21);
OLED_ShowCHinese(32,6,22);
OLED_ShowCHinese(60,6,23);
OLED_ShowCHinese(108,4,26);
while(DS18B20_Init())
{
delay_ms(200);
delay_ms(200);
delay_ms(200);
}
while(DHT11_Init())
{
delay_ms(200);
delay_ms(200);
}
while(1)
{
printf("%d",123);
if(t%10==0) //ÿ100ms��ȡһ��
{
temperature=DS18B20_Get_Temp();
OLED_ShowNum(70,0,temperature/10,2,16); //��ʾ�¶�
USART_SendData(USART1,ccc);
printf("%d",temperature);
if(temperature/10<23)
GPIO_ResetBits(GPIOB,GPIO_Pin_7);
if(temperature/10>=30)
GPIO_SetBits(GPIOB,GPIO_Pin_7);
//
OLED_ShowString(85,0,".",16);
OLED_ShowNum(90,0,temperature%10,2,16);
}
delay_ms(10);
t++;
if(t==20)
{
t=0;
}
if(a!=calendar.sec)
{
a=calendar.sec;
LCD_ShowNum(60,130,calendar.w_year,4,16);
OLED_ShowNum(0,6,calendar.w_year,4,16);
OLED_ShowString(30,6,".",16);
LCD_ShowNum(100,130,calendar.w_month,2,16);
OLED_ShowNum(33,6,calendar.w_month,1,16);
OLED_ShowString(50,6,".",16);
LCD_ShowNum(123,130,calendar.w_date,2,16);
OLED_ShowString(72,6,".",16);
OLED_ShowNum(53,6,calendar.w_date,2,16);
LCD_ShowNum(60,162,calendar.hour,2,16);
OLED_ShowString(70,6,".",16);
OLED_ShowNum(73,6,calendar.hour,2,16);
LCD_ShowNum(84,162,calendar.min,2,16);
OLED_ShowNum(93,6,calendar.min,2,16);
OLED_ShowString(88,6,".",16);
LCD_ShowNum(108,162,calendar.sec,2,16);
OLED_ShowString(108,6,".",16);
OLED_ShowNum(113,6,calendar.sec,2,16);
LED0=!LED0;
}
delay_ms(10);
AD_value = ADC_ConvertedValue;
AD_value = (AD_value/4096)*3.3;
printf("The current Sound AD value = %4.2fV \r\n", AD_value);
if(AD_value>=2)
{
OLED_ShowCHinese(90,2,31);
OLED_ShowCHinese(108,2,32);
delay_ms(200);
}
if(AD_value<2)
{
OLED_ShowCHinese(90,2,29);
OLED_ShowCHinese(108,2,30);
}
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
key=KEY_Scan(0); //�õ���ֵ
if(key)
{
switch(key)
{
case WKUP_PRES:
TIM_SetCompare2(TIM3,300);
OLED_ShowCHinese(90,4,25);
break;
case KEY1_PRES:
TIM_SetCompare2(TIM3,400);
OLED_ShowCHinese(90,4,27);
break;
case KEY0_PRES:
TIM_SetCompare2(TIM3,0);
OLED_ShowCHinese(90,4,28);
break;
}
}
}
}
🧿 选题指导, 项目分享:
https://blog.csdn.net/molodi/article/details/125933857