基于树莓派的智能家居项目整理
文章目录
一、功能介绍
二、设计框图
三、实物展示
四、程序
一、功能介绍
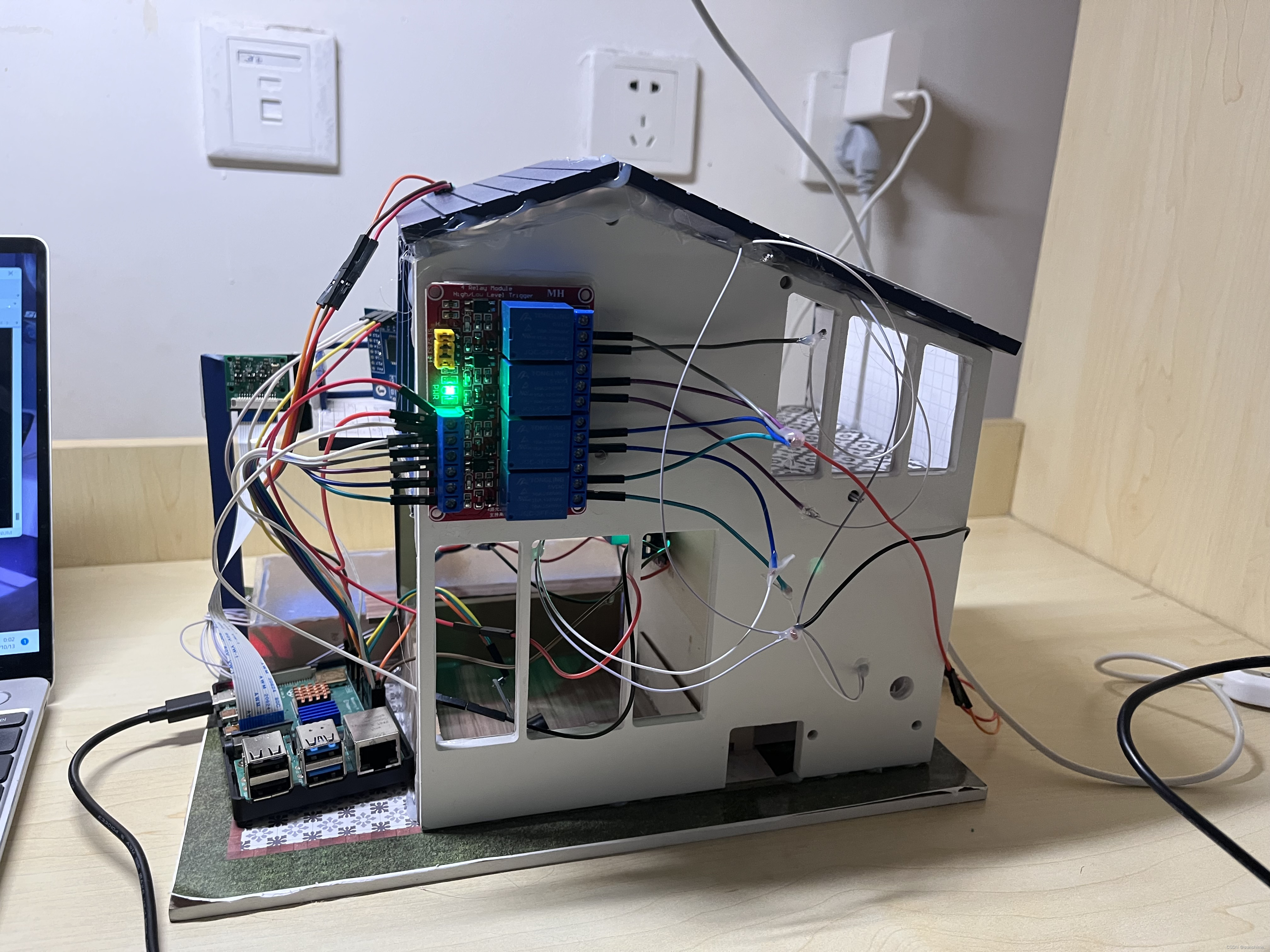
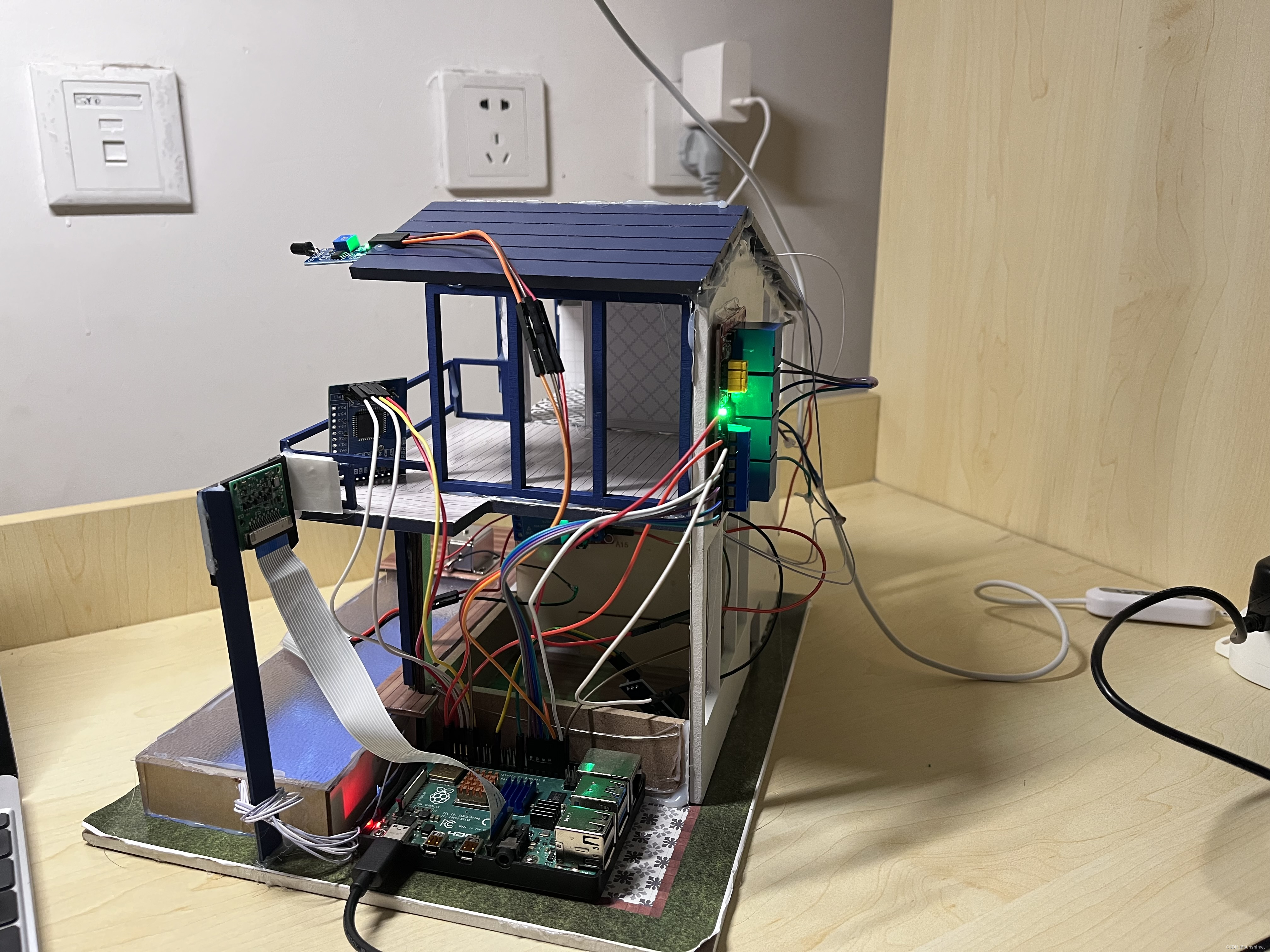
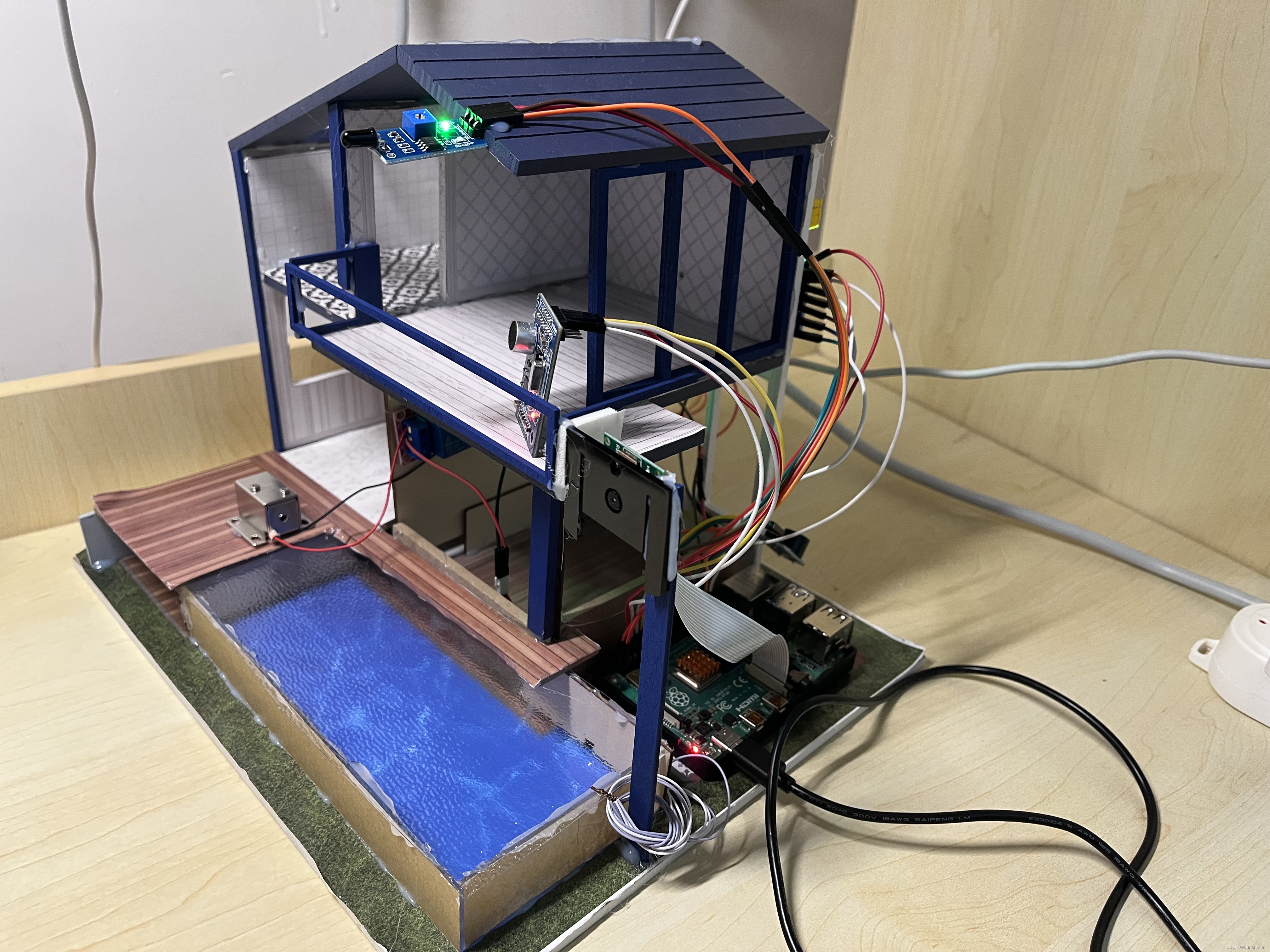
基于树莓派的智能家居。智能家居用到的硬件有:树莓派4B、LD3320语音识别模块、pi 摄像头、继电器组、小灯、火焰传感器、蜂鸣器、电磁锁
采用了简单工厂模式的一个设计方式。稳定,拓展性更强,在C语言中,因为没有接口、类这一说法,所以这里采用了结构体来“等效替换”。有四个灯,所以我创建了四个灯控制.c程序。每一个程序文件中,都有一个设备结构体,每个程序文件的函数实现方法不同,当有新设备进入只需要在创建一个.c文件,改变函数实现方法即可。初始化的时候,通过链表将各个模块连接起来(头插法)。在要使用某个模块时,只需要使用链表遍历,找到所需模块去调用功能
具体功能是:
1、可通过ld3320语音模块的口令模式,口令+具体控制,通过串口把控制指令传给树莓派,来控制客厅、餐厅、二楼、浴室的灯
2、也可以通过socket客户端来发指令来控制灯的开关
3、火灾报警,当火焰传感器检测到火焰的时候,蜂鸣器会报警。
4、视频监控采用开源mjpg-Streamer来实现的,程序执行时创建一个视频监控的线程,用system函数调用启动脚本运行,监控画面可在http://172.20.10.8:8080去看到
5、人脸识别开锁,人脸识别功能是使用的翔云平台的人脸识别解决方案,需要安装libcurl 和 openSSl库来支持https协议,通过系统调用wget +http://172.20.10.8:8080/?action=snapshot -O ./huyu1.jpg 指令到树莓派的监控页面"去截取一帧保存到本地,获取图片的base64编码,工程文件夹下也有一张照片,huyu.jpg格式,相当于采集的人脸。也是获取图片的base64编码,通过sprintf函数将访问翔云需要的两张图片的base64编码与Key、secret、typeId、format拼接在一起,通过https协议去访问翔云平台, 识别成功后会将识别结果返回,通过回调函数readData将返回的字符串读到readBuff里,通过strstr去readbuff里找有没有字符’是’,如果识别成功就去控制电磁锁打开。
二、设计框图

*效果展示:*https://www.bilibili.com/video/BV1uD4y1C7PH?share_source=copy_web&vd_source=5e457ac82f63b0e36b8b9e2708807f31
三、实物展示
四、程序
1、InputCommand.h
#include <wiringPi.h>
#include <stddef.h>
struct InputCommander
{
char commandName[128];
char deviceName[128];
char command[32];
int (*Init)(struct InputCommander *voicer,char *ipAdress,char *port);
int (*getCommand)(struct InputCommander *voicer);
char log[1024];
int fd;
char port[12];
char ipAddress[32];
int sfd;
struct InputCommander *next;
};
struct InputCommander *addVoiceControlToInputCommandLink(struct InputCommander *phead);
struct InputCommander *addSocketControlToInputCommandLink(struct InputCommander *phead);
2、controlDevices .h
#include <wiringPi.h>
#include <stdio.h>
struct Devices
{
char deviceName[128];
int status;
int pinNum;
int (*open)(int pinNum);
int (*close)(int pinNum);
int (*deviceInit)(int pinNum);
int (*readStatus)(int pinNum);
int (*changeStatus)(int status);
void (*faceRecognition)(); //人脸识别
char *(*takePictureInit)();//用于摄像头
char *(*getPicBase64)(); //用于摄像头
size_t (*readData)(); //用于摄像头
struct Devices *next;
};
struct Devices *addBathroomLightToDeviceLink(struct Devices *phead);
struct Devices *addUpstairLightToDeviceLink(struct Devices *phead);
struct Devices *addDiningroomLightToDeviceLink(struct Devices *phead);
struct Devices *addLivingroomLightToDeviceLink(struct Devices *phead);
struct Devices *addFireAlarmToDeviceLink(struct Devices *phead);
struct Devices* addBeepToDeviceLink(struct Devices *phead);
struct Devices *addLookToDeviceLink(struct Devices *phead);
struct Devices *addCameraToDeviceLink(struct Devices *phead);
3、mainPro.c
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include "controlDevices.h"
#include "InputCommand.h"
struct InputCommander *pCommandHead = NULL;
struct Devices *pdeviceHead = NULL;
struct InputCommander *socketHandler = NULL;
int c_fd;
char *name = NULL;
pthread_t cameraThread;
struct Devices *findDeviceByName(char *name,struct Devices *phead)
{
struct Devices *tmp = phead;
if(phead == NULL)
{
return NULL;
}
else{
while(tmp != NULL){
if(strcmp(tmp->deviceName,name) == 0)
{
return tmp;
}
tmp = tmp->next;
}
return NULL;
}
}
struct InputCommander *findCommandByName(char *name,struct InputCommander *phead)
{
struct InputCommander *tmp = phead;
if(phead == NULL)
{
return NULL;
}
else
{
while(tmp != NULL){
if(strcmp(tmp->commandName,name) == 0)
{
return tmp;
}
tmp = tmp->next;
}
return NULL;
}
}
void *camera_thread(void *datas) //摄像头线程
{
struct Devices *cameraTemp;
cameraTemp = findDeviceByName("camera", pdeviceHead); //设备都要从工厂里面取出来
if (cameraTemp == NULL)
{ //防止段错误的必需判断,当给指针赋值是,一定要考虑NULL的情况
printf("find camera error\n");
pthread_exit(NULL); //在线程中不用return
}
cameraTemp->faceRecognition(); //调用人脸识别函数
}
void * voice_thread(void *datas) //语音线程
{
int nread;
struct InputCommander *voiceHandler = NULL;
struct Devices *linkHandler = NULL;
voiceHandler = findCommandByName("voice",pCommandHead);
if(voiceHandler == NULL){
printf("find voicehandler error\n");
pthread_exit(NULL);
}else{
if(voiceHandler->Init(voiceHandler,NULL,NULL)<0){
printf("voice init error\n");
pthread_exit(NULL);
}else{
printf("%s init success!\n",voiceHandler->commandName);
}
while(1){
memset(voiceHandler->command,'\0',sizeof(voiceHandler->command));
nread = voiceHandler->getCommand(voiceHandler); //读取来自语音模块的消息
printf(" %s\n",voiceHandler->command);
if(nread > 1){
if(strstr(voiceHandler->command,"KEL") != NULL){ //开二楼灯
linkHandler = findDeviceByName("upstairLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
printf("open upstairLight\n");
}else if(strstr(voiceHandler->command,"GEL") != NULL){ //关二楼灯
linkHandler = findDeviceByName("upstairLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
printf("close upstairLight\n");
}else if(strstr(voiceHandler->command,"KYS") != NULL){ //开浴室灯
linkHandler = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
printf("open bathroomlight\n");
}else if(strstr(voiceHandler->command,"GYS") != NULL){ //关浴室灯
linkHandler = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
printf("open bathroomlight\n");
}else if(strstr(voiceHandler->command,"KKT") != NULL){ //开客厅灯
linkHandler = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
printf("open livingroomLight\n");
}else if(strstr(voiceHandler->command,"GKT") != NULL){ //关客厅灯
linkHandler = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
printf("open livingroomLight\n");
}else if(strstr(voiceHandler->command,"KCT") != NULL){//开餐厅灯
linkHandler = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
printf("open diningroomLight\n");
}else if(strstr(voiceHandler->command,"GCT") != NULL){//关餐厅灯
linkHandler = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
printf("open diningroomLight\n");
}else if(strstr(voiceHandler->command,"KM") != NULL){//开门
pthread_create(&cameraThread,NULL,camera_thread,NULL);
}else if(strstr(voiceHandler->command,"DQK") != NULL){//打开全部灯
linkHandler = findDeviceByName("upstairLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
linkHandler = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
linkHandler = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
linkHandler = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler->deviceInit(linkHandler->pinNum);
linkHandler->open(linkHandler->pinNum);
printf("All closed\n");
}else if(strstr(voiceHandler->command,"DQG") != NULL){//关闭全部灯
linkHandler = findDeviceByName("upstairLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
linkHandler = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
linkHandler = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
linkHandler = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler->close(linkHandler->pinNum);
printf("All open\n");
}else if(nread == 0){
printf("nodata from voice......\n");
}
//printf("%d\n",strlen(voiceHandler->command));
}
}
}
}
void * read_thread(void *datas)
{
int n_read;
struct Devices *linkHandler1 = NULL;
memset(socketHandler->command,'\0',sizeof(socketHandler->command));
n_read = read(c_fd,socketHandler->command,sizeof(socketHandler->command));
if(n_read>0){
printf("get message:%d,%s\n",n_read,socketHandler->command);
if(strstr(socketHandler->command,"KEL") != NULL){ //开二楼灯
linkHandler1 = findDeviceByName("upstairLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
printf("open upstairLight\n");
}else if(strstr(socketHandler->command,"GEL") != NULL){ //关二楼灯
linkHandler1 = findDeviceByName("upstairLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
printf("close upstairLight\n");
}else if(strstr(socketHandler->command,"KYS") != NULL){ //开浴室灯
linkHandler1 = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
printf("open bathroomlight\n");
}else if(strstr(socketHandler->command,"GYS") != NULL){ //关浴室灯
linkHandler1 = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
printf("close bathroomlight\n");
}else if(strstr(socketHandler->command,"KKT") != NULL){ //开客厅灯
linkHandler1 = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
printf("open livingroomLight\n");
}else if(strstr(socketHandler->command,"GKT") != NULL){ //关客厅灯
linkHandler1 = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
printf("close livingroomLight\n");
}else if(strstr(socketHandler->command,"KCT") != NULL){//开餐厅灯
linkHandler1 = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
printf("open diningroomLight\n");
}else if(strstr(socketHandler->command,"GCT") != NULL){//关餐厅灯
linkHandler1 = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
printf("close diningroomLight\n");
}else if(strstr(socketHandler->command,"KM") != NULL){//开门
//linkHandler1 = findDeviceByName("camera",pdeviceHead);
//linkHandler1->takePictureInit();
//linkHandler1->faceRecognition();
pthread_create(&cameraThread,NULL,camera_thread,NULL);
}else if(strstr(socketHandler->command,"GM") != NULL){//关门
linkHandler1 = findDeviceByName("lock",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
}else if(strstr(socketHandler->command,"DQK") != NULL){//打开全部灯
linkHandler1 = findDeviceByName("upstairLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
linkHandler1 = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
linkHandler1 = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
linkHandler1 = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler1->deviceInit(linkHandler1->pinNum);
linkHandler1->open(linkHandler1->pinNum);
printf("All open\n");
}else if(strstr(socketHandler->command,"DQG") != NULL){ //关闭全部灯
linkHandler1 = findDeviceByName("upstairLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
linkHandler1 = findDeviceByName("bathroomLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
linkHandler1 = findDeviceByName("livingroomLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
linkHandler1 = findDeviceByName("diningroomLight",pdeviceHead);
linkHandler1->close(linkHandler1->pinNum);
printf("All closed\n");
}else if(n_read == -1){
perror("read");
}
}
}
void * socket_thread(void *datas) //socket线程
{
int n_read = 0;
pthread_t readThread;
struct sockaddr_in c_addr;
memset(&c_addr,0,sizeof(struct sockaddr_in));
int clen = sizeof(struct sockaddr_in);
socketHandler = findCommandByName("socketServer",pCommandHead);
if(socketHandler == NULL){
printf("find socketHandler error\n");
pthread_exit(NULL);
}else{
printf("%s init success!\n",socketHandler->commandName);
}
socketHandler->Init(socketHandler,NULL,NULL);
while(1){
c_fd = accept(socketHandler->sfd,(struct sockaddr *)&c_addr,&clen);
pthread_create(&readThread,NULL,read_thread,NULL);
}
}
void * video_thread(void *datas) //视频监控线程
{
system("/home/pi/mjpg-streamer/mjpg-streamer-experimental/start.sh");
pthread_exit(NULL);
}
void * fireAlarm_thread(void *datas) //火灾报警线程
{
int status;
struct Devices *firetmp = NULL;
struct Devices *beeptmp = NULL;
firetmp = findDeviceByName("fireAlarm",pdeviceHead); //寻找“火焰传感器”链表节点,返回给firetmp
beeptmp = findDeviceByName("beep",pdeviceHead); //寻找“蜂鸣器”链表节点,返回给buztmp
while(1){
status = firetmp->readStatus(firetmp->pinNum); //读取“火焰传感器”状态
if(status == 0){
beeptmp->deviceInit(beeptmp->pinNum); //检测到火焰或强光源
beeptmp->open(beeptmp->pinNum); //打开蜂鸣器
printf("Warning of fire!!!\n");
delay(1000); //延时1000毫秒=1秒
}
if(status == 1){ //未检测到火焰、强光源或解除警报
beeptmp->close(beeptmp->pinNum); //关闭蜂鸣器
}
}
}
int main()
{
//char name[128] = {'\0'};
pthread_t voiceThread;
pthread_t socketThread;
pthread_t fireAlarmThread;
pthread_t videoThread;
pthread_t cameraThread;
struct Devices *tmp = NULL;
if(wiringPiSetup() == -1)
{
return -1;
}
//1. 指令工厂初始化
pCommandHead = addVoiceControlToInputCommandLink(pCommandHead);
pCommandHead = addSocketControlToInputCommandLink(pCommandHead);
//2. 设备控制工厂初始化
pdeviceHead = addBathroomLightToDeviceLink(pdeviceHead);
pdeviceHead = addUpstairLightToDeviceLink(pdeviceHead);
pdeviceHead = addLivingroomLightToDeviceLink(pdeviceHead);
pdeviceHead = addDiningroomLightToDeviceLink(pdeviceHead);
pdeviceHead = addFireAlarmToDeviceLink(pdeviceHead);
pdeviceHead = addBeepToDeviceLink(pdeviceHead);
pdeviceHead = addLookToDeviceLink(pdeviceHead);
pdeviceHead = addCameraToDeviceLink(pdeviceHead);
struct Devices *tmpequiphead = pdeviceHead;
if(tmpequiphead != NULL){ //设备工厂所有设备初始化
tmpequiphead->deviceInit(tmpequiphead->pinNum);
tmpequiphead = tmpequiphead->next;
}
//3.池建立
//3.1 语音线程
//int pthread_create(pthread_t *restrict tidp, const pthread_attr_t *restrict attr, void *(*start_rtn)(void *), void *restrict arg);
pthread_create(&voiceThread,NULL,voice_thread,NULL);
//3.2 socket线程
pthread_create(&socketThread,NULL,socket_thread,NULL);
//3.3 摄像头线程
//printf("camera_thread1===============\n");
pthread_create(&cameraThread,NULL,camera_thread,NULL);
//3.4 火灾线程
pthread_create(&fireAlarmThread,NULL,fireAlarm_thread,NULL);
//3.视频监控
pthread_create(&videoThread, NULL, video_thread, NULL);
pthread_join(voiceThread,NULL);
pthread_join(socketThread,NULL);
pthread_join(cameraThread,NULL);
pthread_join(fireAlarmThread,NULL);
pthread_join(videoThread,NULL);
return 0;
}
4、upstairLight.c
#include "controlDevices.h"
#include <stddef.h>
/*struct Devices
{
char deviceName[128];
int status;
int (*open)();
int (*close)();
int (*deviceInit)();
int (*readStatus)()
int (*changeStatus)(int status);
struct Devices *next;
};
*/
int upstairLightOpen(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
int upstairLightClose(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int upstairLightInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,LOW);
}
int upstairLightStatus(int status)
{
}
struct Devices upstairLight = {
.deviceName = "upstairLight",
.pinNum = 21,
.open = upstairLightOpen,
.close = upstairLightClose,
.deviceInit = upstairLightInit,
.changeStatus = upstairLightStatus,
.next = NULL
};
struct Devices *addUpstairLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &upstairLight;
}
else
{
upstairLight.next = phead;
phead = &upstairLight;
return phead;
}
}
5、bathroomLight.c
#include "controlDevices.h"
#include <stddef.h>
/*struct Devices
{
char deviceName[128];
int status;
int (*open)();
int (*close)();
int (*deviceInit)();
int (*readStatus)()
int (*changeStatus)(int status);
struct Devices *next;
};
*/
int bathroomLightOpen(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
int bathroomLightClose(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int bathroomLightInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,LOW);
}
int bathroomLightStatus(int status)
{
}
struct Devices bathroomLight = {
.deviceName = "bathroomLight",
.pinNum = 22,
.open = bathroomLightOpen,
.close = bathroomLightClose,
.deviceInit = bathroomLightInit,
.changeStatus = bathroomLightStatus,
.next = NULL
};
struct Devices *addBathroomLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &bathroomLight;
}
else
{
bathroomLight.next = phead;
phead = &bathroomLight;
return phead;
}
}
6、livingroomLight.c
#include "controlDevices.h"
#include <stddef.h>
/*struct Devices
{
char deviceName[128];
int status;
int (*open)();
int (*close)();
int (*deviceInit)();
int (*readStatus)()
int (*changeStatus)(int status);
struct Devices *next;
};
*/
int livingroomLightOpen(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
int livingroomLightClose(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int livingroomLightInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,LOW);
}
int livingroomLightStatus(int status)
{
}
struct Devices livingroomLight = {
.deviceName = "livingroomLight",
.pinNum = 23,
.open = livingroomLightOpen,
.close = livingroomLightClose,
.deviceInit = livingroomLightInit,
.changeStatus = livingroomLightStatus,
.next = NULL
};
struct Devices *addLivingroomLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &livingroomLight;
}
else
{
livingroomLight.next = phead;
phead = &livingroomLight;
return phead;
}
}
7、diningroomLight.c
#include "controlDevices.h"
#include <stddef.h>
/*struct Devices
{
char deviceName[128];
int status;
int (*open)();
int (*close)();
int (*deviceInit)();
int (*readStatus)()
int (*changeStatus)(int status);
struct Devices *next;
};
*/
int diningroomLightOpen(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
int diningroomLightClose(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int diningroomLightInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,LOW);
}
int diningroomLightStatus(int status)
{
}
struct Devices diningroomLight = {
.deviceName = "diningroomLight",
.pinNum = 24,
.open = diningroomLightOpen,
.close = diningroomLightClose,
.deviceInit = diningroomLightInit,
.changeStatus = diningroomLightStatus,
.next = NULL
};
struct Devices *addDiningroomLightToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &diningroomLight;
}
else
{
diningroomLight.next = phead;
phead = &diningroomLight;
return phead;
}
}
8、fire.c
#include "controlDevices.h"
#include <stddef.h>
int fireAlarmInit(int pinNum)
{
pinMode(pinNum,INPUT);
digitalWrite(pinNum,HIGH);
}
int fireStatusRead(int pinNum)
{
return digitalRead(pinNum);
}
struct Devices fireAlarm = {
.deviceName = "fireAlarm",
.pinNum = 25,
.deviceInit = fireAlarmInit,
.readStatus = fireStatusRead,
.next = NULL
};
struct Devices *addFireAlarmToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return & fireAlarm;
}
else
{
fireAlarm.next = phead;
phead = & fireAlarm;
}
}
9、beep.c
#include "controlDevices.h"
struct Devices *addBeepToDeviceLink(struct Devices *phead);
int beepInit(int pinNum) //初始化函数
{
pinMode(pinNum,OUTPUT); //配置引脚为输出引脚
digitalWrite(pinNum,LOW); //引脚输出低电平,即默认为关闭状态
}
int beepOpen(int pinNum) //打开蜂鸣器函数
{
digitalWrite(pinNum,HIGH);
}
int beepClose(int pinNum) //关闭蜂鸣器函数
{
digitalWrite(pinNum,LOW);
}
struct Devices beep = { //蜂鸣器设备链表节点
.deviceName = "beep",
.pinNum = 27, //树莓派gpio引脚27
.deviceInit = beepInit,
.open = beepOpen,
.close = beepClose,
.next = NULL
};
struct Devices* addBeepToDeviceLink(struct Devices *phead) //头插法将设备节点加入设备工厂链表函数
{
if(phead == NULL){
return &beep;
}else{
beep.next = phead;
phead = &beep;
return phead;
}
}
10、voiceControl.c
#include "InputCommand.h"
#include <wiringPi.h>
#include <wiringSerial.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
int voiceGetCommand(struct InputCommander *voicer)
{
int nread = 0;
//memset(voicer->command,'\0',sizeof(voicer->command));
nread = read(voicer->fd,voicer->command,sizeof(voicer->command));
if(nread == 0){
printf("usart for voice read over time!\n");
}else{
return nread; //读取到的指令是存放到voicer.command的
}
}
int voiceInit(struct InputCommander *voicer,char *ipAdress,char *port)
{
int fd;
//printf("test init1\n");
if((fd = serialOpen(voicer->deviceName,9600))== -1) //初始化串口,波特率9600
{
printf("open serial error\n");
exit(-1);
}
voicer->fd = fd;
return fd;
}
struct InputCommander voiceControl = {
.commandName = "voice",
.deviceName = "/dev/ttyAMA0",
.command = {'\0'},
.Init = voiceInit,
.getCommand = voiceGetCommand,
.log = {'\0'},
.next = NULL
};
struct InputCommander *addVoiceControlToInputCommandLink(struct InputCommander *phead)
{
if(phead == NULL){
return &voiceControl;
}
else
{
voiceControl.next = phead;
phead = &voiceControl;
}
}
11、socketControl.c
#include "InputCommand.h"
#include <wiringPi.h>
#include <wiringSerial.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <string.h>
int socketGetCommand(struct InputCommander *socketMes)
{
int c_fd;
int n_read = 0;
struct sockaddr_in c_addr;
memset(&c_addr,0,sizeof(struct sockaddr_in));
int clen = sizeof(struct sockaddr_in); //大小
c_fd = accept(socketMes->sfd,(struct sockaddr *)&c_addr,&clen); //强制转换,不然会有警告
//5.read
n_read = read(c_fd,socketMes->command,sizeof(socketMes->command));
if(n_read == -1){
perror("read");
}else if(n_read>0){
printf("get message:%d\n",n_read);
}else{
printf("client quit\n");
}
return n_read;
}
int socketInit(struct InputCommander *socketMes,char *ipAdress,char *port)
{
int s_fd;
struct sockaddr_in s_addr;
memset(&s_addr,0,sizeof(struct sockaddr_in));
//1.socket
s_fd = socket(AF_INET,SOCK_STREAM,0);
if(s_fd == -1){
perror("scoket");
exit(-1);
}
s_addr.sin_family = AF_INET; //地址族:使用IPv4
s_addr.sin_port = htons(atoi(socketMes->port)); //端口号,使用网络字节序表示
inet_aton(socketMes->ipAddress,&s_addr.sin_addr); //IP地址v4地址,用网络字节序表示
//2.bind
bind(s_fd,(struct sockaddr *)&s_addr,sizeof(struct sockaddr_in));
//3.listen
listen(s_fd,10);
printf("socket Server listening......\n");
socketMes->sfd = s_fd;
return s_fd;
}
struct InputCommander socketControl = {
.commandName = "socketServer",
.command = {'\0'},
.port = "8088",
.ipAddress = "172.20.10.8",
.Init = socketInit,
.getCommand = socketGetCommand,
.log = {'\0'},
.next = NULL
};
struct InputCommander *addSocketControlToInputCommandLink(struct InputCommander *phead)
{
if(phead == NULL){
return &socketControl;
}
else
{
socketControl.next = phead;
phead = &socketControl;
return phead;
}
}
12、lock.c
#include "controlDevices.h"
#include <stddef.h>
/*struct Devices
{
char deviceName[128];
int status;
int (*open)();
int (*close)();
int (*deviceInit)();
int (*readStatus)()
int (*changeStatus)(int status);
struct Devices *next;
};
*/
int lookOpen(int pinNum)
{
digitalWrite(pinNum,HIGH);
}
int lookClose(int pinNum)
{
digitalWrite(pinNum,LOW);
}
int lookInit(int pinNum)
{
pinMode(pinNum,OUTPUT);
digitalWrite(pinNum,LOW);
}
int lookStatus(int status)
{
}
struct Devices look = {
.deviceName = "look",
.pinNum = 29,
.open = lookOpen,
.close = lookClose,
.deviceInit = lookInit,
.changeStatus = lookStatus,
.next = NULL
};
struct Devices *addLookToDeviceLink(struct Devices *phead)
{
if(phead == NULL){
return &look;
}
else
{
look.next = phead;
phead = &look;
return phead;
}
}